

Charts on SO(3)
Encyclopedia
In mathematics
, the special orthogonal group in three dimensions, otherwise known as the rotation group
SO(3), is a naturally occurring example of a manifold
. The various charts on SO(3) set up rival coordinate system
s: in this case there cannot be said to be a preferred set of parameter
s describing a rotation. There are three degrees of freedom
, so that the dimension of SO(3) is three. In numerous applications one or other coordinate system is used, and the question arises how to convert from a given system to another.
the rotation group is the group
of all rotation
s about the origin of three-dimensional Euclidean space
R3 under the operation of composition. By definition, a rotation about the origin is a linear transformation
that preserves length
of vectors (it is an isometry
) and preserves orientation
(i.e. handedness) of space. A length-preserving transformation which reverses orientation is called an improper rotation
. Every improper rotation of three-dimensional Euclidean space is rotation followed by a reflection
in a plane through the origin.
Composing two rotations results in another rotation; every rotation has a unique inverse rotation; and the identity map
satisfies the definition of a rotation. Owing to the above properties, the set of all rotations is a group
under composition. Moreover, the rotation group has a natural manifold
structure for which the group operations are smooth
; so it is in fact a Lie group
. The rotation group is often denoted SO(3) for reasons explained below.
The space of rotations is isomorphic with the set of rotation operator
s and the set of "orthonormal matrices with determinant +1". It is also isomorphic with the set of quaternions with their internal product, and also equivalent to the set of rotation vectors, with a difficult internal composition operation given by the product of their equivalent matrices.
Rotation vectors notation arise from the Euler's rotation theorem
which states that any rotation in three dimensions can be described by a rotation by some angle about some axis. Considering this, we can then specify the axis of one of these rotations by two angles, and we can use the radius of the vector to specify the angle of rotation
. These vectors represent a ball
in 3D with an unusual topology.
This 3D solid sphere is equivalent to the surface of a 4D sphere, which is also a 3D variety. For doing this equivalence, we will have to define how will we represent a rotation with this 4D-embedded surface.
 , the boundary of a disk in 4-dimensional Euclidean space. For doing this, we will have to define how will we represent a rotation with this 4D-embedded surface.
, the boundary of a disk in 4-dimensional Euclidean space. For doing this, we will have to define how will we represent a rotation with this 4D-embedded surface.
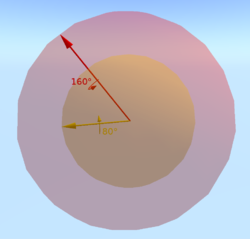
The way in which the radius can be used to specify the angle of rotation is not straightforward. It can be related to circles of latitude in a sphere with a defined north pole and is explained following.
Beginning at the north pole of a sphere in three dimensional space, we specify the point at the north pole to represent the identity rotation. In the case of the identity rotation, no axis of rotation is defined, and the angle of rotation (zero) is irrelevant. A rotation having a very small rotation angle can be specified by a slice through the sphere parallel to the xy plane and very near the north pole. The circle defined by this slice will be very small, corresponding to the small angle of the rotation. As the rotation angles become larger, the slice moves southward, and the circles become larger until the equator of the sphere is reached, which will correspond to a rotation angle of 180 degrees. Continuing southward, the radii of the circles now become smaller (corresponding to the absolute value of the angle of the rotation considered as a negative number). Finally, as the south pole is reached, the circles shrink once more to the identity rotation, which is also specified as the point at the south pole. Notice that a number of characteristics of such rotations and their representations can be seen by this visualization.
The space of rotations is continuous, each rotation has a neighborhood of rotations which are nearly the same, and this neighborhood becomes flat as the neighborhood shrinks.
 Also, each rotation is actually represented by two antipodal points on the sphere, which are at opposite ends of a line through the center of the sphere. This reflects the fact that each rotation can be represented as a rotation about some axis, or, equivalently, as a negative rotation about an axis pointing in the opposite direction (a so-called double cover). The "latitude" of a circle representing a particular rotation angle will be half of the angle represented by that rotation, since as the point is moved from the north to south pole, the latitude ranges from zero to 180 degrees, while the angle of rotation ranges from 0 to 360 degrees
Also, each rotation is actually represented by two antipodal points on the sphere, which are at opposite ends of a line through the center of the sphere. This reflects the fact that each rotation can be represented as a rotation about some axis, or, equivalently, as a negative rotation about an axis pointing in the opposite direction (a so-called double cover). The "latitude" of a circle representing a particular rotation angle will be half of the angle represented by that rotation, since as the point is moved from the north to south pole, the latitude ranges from zero to 180 degrees, while the angle of rotation ranges from 0 to 360 degrees
. (the "longitude" of a point then represents a particular axis of rotation.) Note however that this set of rotations is not closed under composition.
Two successive rotations with axes in the xy plane will not necessarily give a rotation whose axis lies in the xy plane, and thus cannot be represented as a point on the sphere. This will not be the case with a general rotation in 3-space, which do form a closed set under composition.
This visualization can be extended to a general rotation in 3 dimensional space. The identity rotation is a point, and a small angle of rotation about some axis can be represented as a point on a sphere with a small radius. As the angle of rotation grows, the sphere grows, until the angle of rotation reaches 180 degrees, at which point the sphere begins to shrink, becoming a point as the angle approaches 360 degrees (or zero degrees from the negative direction). This set of expanding and contracting spheres represents a hypersphere in four dimensional space
(a 3-sphere).
Just as in the simpler example above, each rotation represented as a point on the hypersphere is matched by its antipodal point on that hypersphere. The "latitude" on the hypersphere will be half of the corresponding angle of rotation, and the neighborhood of any point will become "flatter" (i.e. be represented by a 3-D Euclidean space of points) as the neighborhood shrinks.
This behavior is matched by the set of unit quaternions: A general quaternion represents a point in a four dimensional space, but constraining it to have unit magnitude yields a three dimensional space equivalent to the surface of a hypersphere. The magnitude of the unit quaternion will be unity, corresponding to a hypersphere of unit radius.
The vector part of a unit quaternion represents the radius of the 2-sphere corresponding to the axis of rotation, and its magnitude is the sine of half the angle of rotation. Each rotation is represented by two unit quaternions of opposite sign, and, as in the space of rotations in three dimensions, the quaternion product of two unit quaternions will yield a unit quaternion. Also, the space of unit quaternions is "flat" in any infinitesimal neighborhood of a given unit quaternion.
), such parameterization is degenerate at some points on the hypersphere, leading to the problem of gimbal lock
. We can avoid this by using four Euclidean coordinates w,x,y,z, with w2 + x2 + y2 + z2 = 1. The point (w,x,y,z) represents a rotation around the axis directed by the vector by an angle
by an angle 
This problem is similar to parameterize the bidimensional surface of a sphere
with two coordinates, such as latitude and longitude. Latitude and longitude are ill-behaved (degenerate
) at the north and south poles, though the poles are not intrinsically different from any other points on the sphere. At the poles (latitudes +90° and −90°), the longitude becomes meaningless. It can be shown that no two-parameter coordinate system can avoid such degeneracy.
The possible parametrizations candidates include:
s in the definition of chart. Problems of this sort are inevitable, since SO(3) is diffeomorphic to real projective space
RP3, which is a quotient of S3 by identifying antipodal points, and charts try to model a manifold using R3.
This explains why, for example, the Euler angles appear to give a variable in the 3-torus
, and the unit quaternions in a 3-sphere
. The uniqueness of the representation by Euler angles breaks down at some points (cf. gimbal lock
), while the quaternion representation is always a double cover, with q and −q giving the same rotation.
If we use a skew-symmetric matrix, every 3×3 skew-symmetric matrix is determined by 3 parameters, and so at first glance, the parameter space is R3. Exponentiating
such a matrix results in an orthogonal 3×3 matrix of determinant 1 – in other words, a rotation matrix, but this is a many-to-one map. Note that it is not a covering map
– while it is a local homeomorphism near the origin, it is not a covering map at rotations by 180 degrees. It is possible to restrict these matrices to a ball around the origin in R3 so that rotations do not exceed 180 degrees, and this will be one-to-one, except for rotations by 180 degrees, which correspond to the boundary S2, and these identify antipodal points – this is the cut locus
. The 3-ball with this identification of the boundary is RP3. A similar situation holds for applying a Cayley transform to the skew-symmetric matrix.
Axis angle gives parameters in S2×S1; if we replace the unit vector by the actual axis of rotation, so that n and −n give the same axis line, the set of axis becomes RP2, the real projective plane
. But since rotations around n and −n are parameterized by opposite values of θ, the result is an S1 bundle over RP2, which turns out to be RP3.
Fractional linear transformations use four complex parameters, a, b, c, and d, with the condition that ad-bc is non-zero. Since multiplying all four parameters by the same complex number does not change the parameter, we can insist that ad-bc=1. This suggests writing (a,b,c,d) as a 2×2 complex matrix of determinant 1, that is, as an element of the special linear group SL(2,C). But not all such matrices produce rotations: conformal maps on S2 are also included. To only get rotations we insist that d is the complex conjugate of a, and c is the negative of the complex conjugate of b. Then we have two complex numbers, a and b, subject to |a|2+|b|2=1. If we write a+bj, this is a quaternion of unit length.
Ultimately, since R3 is not RP3, there will be a problem with each of these approaches. In some cases, we need to remember that certain parameter values result in the same rotation, and to remove this issue, boundaries must be set up, but then a path through this region in R3 must then suddenly jump to a different region when it crosses a boundary. Gimbal lock is a problem when the derivative of the map is not full rank, which occurs with Euler angles and Tait–Bryan angles, but not for the other choices. The quaternion representation has none of these problems (being a two-to-one mapping everywhere), but it has 4 parameters with a condition (unit length), which sometimes makes it harder to see the three degrees of freedom available.
of a rigid body
. One can take as definition the idea of a curve
in the Euclidean group
E(3) of three-dimensional Euclidean space
, starting at the identity (initial position). The translation subgroup T of E(3) is a normal subgroup
, with quotient SO(3) if we look at the subgroup E+(3) of direct isometries only (which is reasonable in kinematics). The translational part can be decoupled from the rotational part in standard Newtonian kinematics by considering the motion of the center of mass, and rotations of the rigid body about the center of mass. Therefore any rigid body movement leads directly to SO(3), when we factor out the translational part.
These identifications illustrate that SO(3) is connected
but not simply connected. As to the latter, in the ball with antipodal surface points identified, consider the path running from the "north pole" straight through the center down to the south pole. This is a closed loop, since the north pole and the south pole are identified. This loop cannot be shrunk to a point, since no matter how you deform the loop, the start and end point have to remain antipodal, or else the loop will "break open". In terms of rotations, this loop represents a continuous sequence of rotations about the z-axis starting and ending at the identity rotation (i.e. a series of rotation through an angle φ where φ runs from 0 to 2π).
Surprisingly, if you run through the path twice, i.e., from north pole down to south pole and back to the north pole so that φ runs from 0 to 4π, you get a closed loop which can be shrunk to a single point: first move the paths continuously to the ball's surface, still connecting north pole to south pole twice. The second half of the path can then be mirrored over to the antipodal side without changing the path at all. Now we have an ordinary closed loop on the surface of the ball, connecting the north pole to itself along a great circle. This circle can be shrunk to the north pole without problems.
The same argument can be performed in general, and it shows that the fundamental group
of SO(3) is cyclic group
of order 2. In physics
applications, the non-triviality of the fundamental group allows for the existence of objects known as spinor
s, and is an important tool in the development of the spin-statistics theorem
.
The universal cover of SO(3) is a Lie group
called Spin(3). The group Spin(3) is isomorphic to the special unitary group
SU(2); it is also diffeomorphic to the unit 3-sphere
S3 and can be understood as the group of unit quaternions
(i.e. those with absolute value
1). The connection between quaternions and rotations, commonly exploited in computer graphics
, is explained in quaternions and spatial rotation
s. The map from S3 onto SO(3) that identifies antipodal points of S3 is a surjective homomorphism
of Lie groups, with kernel
{±1}. Topologically, this map is a two-to-one covering map
.
Mathematics
Mathematics is the study of quantity, space, structure, and change. Mathematicians seek out patterns and formulate new conjectures. Mathematicians resolve the truth or falsity of conjectures by mathematical proofs, which are arguments sufficient to convince other mathematicians of their validity...
, the special orthogonal group in three dimensions, otherwise known as the rotation group
Rotation group
In mechanics and geometry, the rotation group is the group of all rotations about the origin of three-dimensional Euclidean space R3 under the operation of composition. By definition, a rotation about the origin is a linear transformation that preserves length of vectors and preserves orientation ...
SO(3), is a naturally occurring example of a manifold
Manifold
In mathematics , a manifold is a topological space that on a small enough scale resembles the Euclidean space of a specific dimension, called the dimension of the manifold....
. The various charts on SO(3) set up rival coordinate system
Coordinate system
In geometry, a coordinate system is a system which uses one or more numbers, or coordinates, to uniquely determine the position of a point or other geometric element. The order of the coordinates is significant and they are sometimes identified by their position in an ordered tuple and sometimes by...
s: in this case there cannot be said to be a preferred set of parameter
Parameter
Parameter from Ancient Greek παρά also “para” meaning “beside, subsidiary” and μέτρον also “metron” meaning “measure”, can be interpreted in mathematics, logic, linguistics, environmental science and other disciplines....
s describing a rotation. There are three degrees of freedom
Degrees of freedom (physics and chemistry)
A degree of freedom is an independent physical parameter, often called a dimension, in the formal description of the state of a physical system...
, so that the dimension of SO(3) is three. In numerous applications one or other coordinate system is used, and the question arises how to convert from a given system to another.
The space of rotations
In geometryGeometry
Geometry arose as the field of knowledge dealing with spatial relationships. Geometry was one of the two fields of pre-modern mathematics, the other being the study of numbers ....
the rotation group is the group
Group (mathematics)
In mathematics, a group is an algebraic structure consisting of a set together with an operation that combines any two of its elements to form a third element. To qualify as a group, the set and the operation must satisfy a few conditions called group axioms, namely closure, associativity, identity...
of all rotation
Rotation
A rotation is a circular movement of an object around a center of rotation. A three-dimensional object rotates always around an imaginary line called a rotation axis. If the axis is within the body, and passes through its center of mass the body is said to rotate upon itself, or spin. A rotation...
s about the origin of three-dimensional Euclidean space
Euclidean space
In mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions...
R3 under the operation of composition. By definition, a rotation about the origin is a linear transformation
Linear transformation
In mathematics, a linear map, linear mapping, linear transformation, or linear operator is a function between two vector spaces that preserves the operations of vector addition and scalar multiplication. As a result, it always maps straight lines to straight lines or 0...
that preserves length
Length
In geometric measurements, length most commonly refers to the longest dimension of an object.In certain contexts, the term "length" is reserved for a certain dimension of an object along which the length is measured. For example it is possible to cut a length of a wire which is shorter than wire...
of vectors (it is an isometry
Isometry
In mathematics, an isometry is a distance-preserving map between metric spaces. Geometric figures which can be related by an isometry are called congruent.Isometries are often used in constructions where one space is embedded in another space...
) and preserves orientation
Orientation (mathematics)
In mathematics, orientation is a notion that in two dimensions allows one to say when a cycle goes around clockwise or counterclockwise, and in three dimensions when a figure is left-handed or right-handed. In linear algebra, the notion of orientation makes sense in arbitrary dimensions...
(i.e. handedness) of space. A length-preserving transformation which reverses orientation is called an improper rotation
Improper rotation
In 3D geometry, an improper rotation, also called rotoreflection or rotary reflection is, depending on context, a linear transformation or affine transformation which is the combination of a rotation about an axis and a reflection in a plane perpendicular to the axis.Equivalently it is the...
. Every improper rotation of three-dimensional Euclidean space is rotation followed by a reflection
Reflection (mathematics)
In mathematics, a reflection is a mapping from a Euclidean space to itself that is an isometry with a hyperplane as set of fixed points; this set is called the axis or plane of reflection. The image of a figure by a reflection is its mirror image in the axis or plane of reflection...
in a plane through the origin.
Composing two rotations results in another rotation; every rotation has a unique inverse rotation; and the identity map
Identity map
An identity map is a database access design pattern used to improve performance by providing a context-specific in-memory cache to prevent duplicate retrieval of the same object data from the database....
satisfies the definition of a rotation. Owing to the above properties, the set of all rotations is a group
Group (mathematics)
In mathematics, a group is an algebraic structure consisting of a set together with an operation that combines any two of its elements to form a third element. To qualify as a group, the set and the operation must satisfy a few conditions called group axioms, namely closure, associativity, identity...
under composition. Moreover, the rotation group has a natural manifold
Manifold
In mathematics , a manifold is a topological space that on a small enough scale resembles the Euclidean space of a specific dimension, called the dimension of the manifold....
structure for which the group operations are smooth
Smooth function
In mathematical analysis, a differentiability class is a classification of functions according to the properties of their derivatives. Higher order differentiability classes correspond to the existence of more derivatives. Functions that have derivatives of all orders are called smooth.Most of...
; so it is in fact a Lie group
Lie group
In mathematics, a Lie group is a group which is also a differentiable manifold, with the property that the group operations are compatible with the smooth structure...
. The rotation group is often denoted SO(3) for reasons explained below.
The space of rotations is isomorphic with the set of rotation operator
Rotation operator (vector space)
This article derives the main properties of rotations in 3-dimensional space.The three Euler rotations are one way to bring a rigid object to any desired orientation by sequentially making rotations about axis' fixed relative to the object. However, this can also be achieved with one single...
s and the set of "orthonormal matrices with determinant +1". It is also isomorphic with the set of quaternions with their internal product, and also equivalent to the set of rotation vectors, with a difficult internal composition operation given by the product of their equivalent matrices.
Rotation vectors notation arise from the Euler's rotation theorem
Euler's rotation theorem
In geometry, Euler's rotation theorem states that, in three-dimensional space, any displacement of a rigid body such that a point on the rigid body remains fixed, is equivalent to a single rotation about some axis that runs through the fixed point. It also means that the composition of two...
which states that any rotation in three dimensions can be described by a rotation by some angle about some axis. Considering this, we can then specify the axis of one of these rotations by two angles, and we can use the radius of the vector to specify the angle of rotation
Angle of rotation
In mathematics, the angle of rotation is a measurement of the amount, the angle, that a figure is rotated about a fixed point, often the center of a circle....
. These vectors represent a ball
Ball (mathematics)
In mathematics, a ball is the space inside a sphere. It may be a closed ball or an open ball ....
in 3D with an unusual topology.
This 3D solid sphere is equivalent to the surface of a 4D sphere, which is also a 3D variety. For doing this equivalence, we will have to define how will we represent a rotation with this 4D-embedded surface.
The hypersphere of rotations
Visualizing the hypersphere
It is interesting to consider the space as the three dimensional sphere, the boundary of a disk in 4-dimensional Euclidean space. For doing this, we will have to define how will we represent a rotation with this 4D-embedded surface.The way in which the radius can be used to specify the angle of rotation is not straightforward. It can be related to circles of latitude in a sphere with a defined north pole and is explained following.
Beginning at the north pole of a sphere in three dimensional space, we specify the point at the north pole to represent the identity rotation. In the case of the identity rotation, no axis of rotation is defined, and the angle of rotation (zero) is irrelevant. A rotation having a very small rotation angle can be specified by a slice through the sphere parallel to the xy plane and very near the north pole. The circle defined by this slice will be very small, corresponding to the small angle of the rotation. As the rotation angles become larger, the slice moves southward, and the circles become larger until the equator of the sphere is reached, which will correspond to a rotation angle of 180 degrees. Continuing southward, the radii of the circles now become smaller (corresponding to the absolute value of the angle of the rotation considered as a negative number). Finally, as the south pole is reached, the circles shrink once more to the identity rotation, which is also specified as the point at the south pole. Notice that a number of characteristics of such rotations and their representations can be seen by this visualization.
The space of rotations is continuous, each rotation has a neighborhood of rotations which are nearly the same, and this neighborhood becomes flat as the neighborhood shrinks.
Aliases
Turn (geometry)
A turn is an angle equal to a 360° or 2 radians or \tau radians. A turn is also referred to as a revolution or complete rotation or full circle or cycle or rev or rot....
. (the "longitude" of a point then represents a particular axis of rotation.) Note however that this set of rotations is not closed under composition.
Two successive rotations with axes in the xy plane will not necessarily give a rotation whose axis lies in the xy plane, and thus cannot be represented as a point on the sphere. This will not be the case with a general rotation in 3-space, which do form a closed set under composition.
This visualization can be extended to a general rotation in 3 dimensional space. The identity rotation is a point, and a small angle of rotation about some axis can be represented as a point on a sphere with a small radius. As the angle of rotation grows, the sphere grows, until the angle of rotation reaches 180 degrees, at which point the sphere begins to shrink, becoming a point as the angle approaches 360 degrees (or zero degrees from the negative direction). This set of expanding and contracting spheres represents a hypersphere in four dimensional space
3-sphere
In mathematics, a 3-sphere is a higher-dimensional analogue of a sphere. It consists of the set of points equidistant from a fixed central point in 4-dimensional Euclidean space...
(a 3-sphere).
Just as in the simpler example above, each rotation represented as a point on the hypersphere is matched by its antipodal point on that hypersphere. The "latitude" on the hypersphere will be half of the corresponding angle of rotation, and the neighborhood of any point will become "flatter" (i.e. be represented by a 3-D Euclidean space of points) as the neighborhood shrinks.
This behavior is matched by the set of unit quaternions: A general quaternion represents a point in a four dimensional space, but constraining it to have unit magnitude yields a three dimensional space equivalent to the surface of a hypersphere. The magnitude of the unit quaternion will be unity, corresponding to a hypersphere of unit radius.
The vector part of a unit quaternion represents the radius of the 2-sphere corresponding to the axis of rotation, and its magnitude is the sine of half the angle of rotation. Each rotation is represented by two unit quaternions of opposite sign, and, as in the space of rotations in three dimensions, the quaternion product of two unit quaternions will yield a unit quaternion. Also, the space of unit quaternions is "flat" in any infinitesimal neighborhood of a given unit quaternion.
Parametrizations
We can parameterize the space of rotations in several ways, but degenerations will always appear. For example if we use three angles (Euler anglesEuler angles
The Euler angles are three angles introduced by Leonhard Euler to describe the orientation of a rigid body. To describe such an orientation in 3-dimensional Euclidean space three parameters are required...
), such parameterization is degenerate at some points on the hypersphere, leading to the problem of gimbal lock
Gimbal lock
Gimbal lock is the loss of one degree of freedom in a three-dimensional space that occurs when the axes of two of the three gimbals are driven into a parallel configuration, "locking" the system into rotation in a degenerate two-dimensional space....
. We can avoid this by using four Euclidean coordinates w,x,y,z, with w2 + x2 + y2 + z2 = 1. The point (w,x,y,z) represents a rotation around the axis directed by the vector
by an angle This problem is similar to parameterize the bidimensional surface of a sphere
Sphere
A sphere is a perfectly round geometrical object in three-dimensional space, such as the shape of a round ball. Like a circle in two dimensions, a perfect sphere is completely symmetrical around its center, with all points on the surface lying the same distance r from the center point...
with two coordinates, such as latitude and longitude. Latitude and longitude are ill-behaved (degenerate
Degeneracy (mathematics)
In mathematics, a degenerate case is a limiting case in which a class of object changes its nature so as to belong to another, usually simpler, class....
) at the north and south poles, though the poles are not intrinsically different from any other points on the sphere. At the poles (latitudes +90° and −90°), the longitude becomes meaningless. It can be shown that no two-parameter coordinate system can avoid such degeneracy.
The possible parametrizations candidates include:
- Euler anglesEuler anglesThe Euler angles are three angles introduced by Leonhard Euler to describe the orientation of a rigid body. To describe such an orientation in 3-dimensional Euclidean space three parameters are required...
(θ,φ,ψ), representing a product of rotations about the z-, y- and z-axes;
- Tait–Bryan angles (θ,φ,ψ), representing a product of rotations about the x-, y- and z-axes;
- Axis angleAxis angleThe axis-angle representation of a rotation, also known as the exponential coordinates of a rotation, parameterizes a rotation by two values: a unit vector indicating the direction of a directed axis , and an angle describing the magnitude of the rotation about the axis...
pair (n, θ) of a unit vector representing an axis, and an angle of rotation about it;
- Euler–Rodrigues parameters, a 4-vector v of length 1, an older name for the following;
- a quaternionQuaternionIn mathematics, the quaternions are a number system that extends the complex numbers. They were first described by Irish mathematician Sir William Rowan Hamilton in 1843 and applied to mechanics in three-dimensional space...
q of length 1 (cf. quaternions and spatial rotationQuaternions and spatial rotationUnit quaternions provide a convenient mathematical notation for representing orientations and rotations of objects in three dimensions. Compared to Euler angles they are simpler to compose and avoid the problem of gimbal lock. Compared to rotation matrices they are more numerically stable and may...
, 3-sphere3-sphereIn mathematics, a 3-sphere is a higher-dimensional analogue of a sphere. It consists of the set of points equidistant from a fixed central point in 4-dimensional Euclidean space...
);
- a 3×3 skew-symmetric matrixSkew-symmetric matrixIn mathematics, and in particular linear algebra, a skew-symmetric matrix is a square matrix A whose transpose is also its negative; that is, it satisfies the equation If the entry in the and is aij, i.e...
, via exponentiation; the 3×3 skew-symmetric matrices are the Lie algebraLie algebraIn mathematics, a Lie algebra is an algebraic structure whose main use is in studying geometric objects such as Lie groups and differentiable manifolds. Lie algebras were introduced to study the concept of infinitesimal transformations. The term "Lie algebra" was introduced by Hermann Weyl in the...
SO3, and this is the exponential map in Lie theory;
- Cayley rational parameters, based on the Cayley transformCayley transformIn mathematics, the Cayley transform, named after Arthur Cayley, has a cluster of related meanings. As originally described by , the Cayley transform is a mapping between skew-symmetric matrices and special orthogonal matrices. In complex analysis, the Cayley transform is a conformal mapping in...
, usable in all characteristics;
- fractional linear transformations,
 acting on the Riemann sphereRiemann sphereIn mathematics, the Riemann sphere , named after the 19th century mathematician Bernhard Riemann, is the sphere obtained from the complex plane by adding a point at infinity...
acting on the Riemann sphereRiemann sphereIn mathematics, the Riemann sphere , named after the 19th century mathematician Bernhard Riemann, is the sphere obtained from the complex plane by adding a point at infinity...
.
Problems of the parametrizations
There are problems in using these as more than local charts, to do with their multiple-valued nature, and singularities. That is, one must be careful above all to work only with diffeomorphismDiffeomorphism
In mathematics, a diffeomorphism is an isomorphism in the category of smooth manifolds. It is an invertible function that maps one differentiable manifold to another, such that both the function and its inverse are smooth.- Definition :...
s in the definition of chart. Problems of this sort are inevitable, since SO(3) is diffeomorphic to real projective space
Real projective space
In mathematics, real projective space, or RPn, is the topological space of lines through 0 in Rn+1. It is a compact, smooth manifold of dimension n, and a special case of a Grassmannian.-Construction:...
RP3, which is a quotient of S3 by identifying antipodal points, and charts try to model a manifold using R3.
This explains why, for example, the Euler angles appear to give a variable in the 3-torus
Torus
In geometry, a torus is a surface of revolution generated by revolving a circle in three dimensional space about an axis coplanar with the circle...
, and the unit quaternions in a 3-sphere
3-sphere
In mathematics, a 3-sphere is a higher-dimensional analogue of a sphere. It consists of the set of points equidistant from a fixed central point in 4-dimensional Euclidean space...
. The uniqueness of the representation by Euler angles breaks down at some points (cf. gimbal lock
Gimbal lock
Gimbal lock is the loss of one degree of freedom in a three-dimensional space that occurs when the axes of two of the three gimbals are driven into a parallel configuration, "locking" the system into rotation in a degenerate two-dimensional space....
), while the quaternion representation is always a double cover, with q and −q giving the same rotation.
If we use a skew-symmetric matrix, every 3×3 skew-symmetric matrix is determined by 3 parameters, and so at first glance, the parameter space is R3. Exponentiating
Matrix exponential
In mathematics, the matrix exponential is a matrix function on square matrices analogous to the ordinary exponential function. Abstractly, the matrix exponential gives the connection between a matrix Lie algebra and the corresponding Lie group....
such a matrix results in an orthogonal 3×3 matrix of determinant 1 – in other words, a rotation matrix, but this is a many-to-one map. Note that it is not a covering map
Covering map
In mathematics, more specifically algebraic topology, a covering map is a continuous surjective function p from a topological space, C, to a topological space, X, such that each point in X has a neighbourhood evenly covered by p...
– while it is a local homeomorphism near the origin, it is not a covering map at rotations by 180 degrees. It is possible to restrict these matrices to a ball around the origin in R3 so that rotations do not exceed 180 degrees, and this will be one-to-one, except for rotations by 180 degrees, which correspond to the boundary S2, and these identify antipodal points – this is the cut locus
Cut locus (Riemannian manifold)
In Riemannian geometry, the cut locus of a point p in a manifold is roughly the set of all other points for which there are multiple minimizing geodesics connecting them from p, but it may contain additional points where the minimizing geodesic is unique, under certain circumstances...
. The 3-ball with this identification of the boundary is RP3. A similar situation holds for applying a Cayley transform to the skew-symmetric matrix.
Axis angle gives parameters in S2×S1; if we replace the unit vector by the actual axis of rotation, so that n and −n give the same axis line, the set of axis becomes RP2, the real projective plane
Real projective plane
In mathematics, the real projective plane is an example of a compact non-orientable two-dimensional manifold, that is, a one-sided surface. It cannot be embedded in our usual three-dimensional space without intersecting itself...
. But since rotations around n and −n are parameterized by opposite values of θ, the result is an S1 bundle over RP2, which turns out to be RP3.
Fractional linear transformations use four complex parameters, a, b, c, and d, with the condition that ad-bc is non-zero. Since multiplying all four parameters by the same complex number does not change the parameter, we can insist that ad-bc=1. This suggests writing (a,b,c,d) as a 2×2 complex matrix of determinant 1, that is, as an element of the special linear group SL(2,C). But not all such matrices produce rotations: conformal maps on S2 are also included. To only get rotations we insist that d is the complex conjugate of a, and c is the negative of the complex conjugate of b. Then we have two complex numbers, a and b, subject to |a|2+|b|2=1. If we write a+bj, this is a quaternion of unit length.
Ultimately, since R3 is not RP3, there will be a problem with each of these approaches. In some cases, we need to remember that certain parameter values result in the same rotation, and to remove this issue, boundaries must be set up, but then a path through this region in R3 must then suddenly jump to a different region when it crosses a boundary. Gimbal lock is a problem when the derivative of the map is not full rank, which occurs with Euler angles and Tait–Bryan angles, but not for the other choices. The quaternion representation has none of these problems (being a two-to-one mapping everywhere), but it has 4 parameters with a condition (unit length), which sometimes makes it harder to see the three degrees of freedom available.
Applications
One area in which these considerations, in some form, become inevitable, is the kinematicsKinematics
Kinematics is the branch of classical mechanics that describes the motion of bodies and systems without consideration of the forces that cause the motion....
of a rigid body
Rigid body
In physics, a rigid body is an idealization of a solid body of finite size in which deformation is neglected. In other words, the distance between any two given points of a rigid body remains constant in time regardless of external forces exerted on it...
. One can take as definition the idea of a curve
Curve
In mathematics, a curve is, generally speaking, an object similar to a line but which is not required to be straight...
in the Euclidean group
Euclidean group
In mathematics, the Euclidean group E, sometimes called ISO or similar, is the symmetry group of n-dimensional Euclidean space...
E(3) of three-dimensional Euclidean space
Euclidean space
In mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions...
, starting at the identity (initial position). The translation subgroup T of E(3) is a normal subgroup
Normal subgroup
In abstract algebra, a normal subgroup is a subgroup which is invariant under conjugation by members of the group. Normal subgroups can be used to construct quotient groups from a given group....
, with quotient SO(3) if we look at the subgroup E+(3) of direct isometries only (which is reasonable in kinematics). The translational part can be decoupled from the rotational part in standard Newtonian kinematics by considering the motion of the center of mass, and rotations of the rigid body about the center of mass. Therefore any rigid body movement leads directly to SO(3), when we factor out the translational part.
These identifications illustrate that SO(3) is connected
Connectedness
In mathematics, connectedness is used to refer to various properties meaning, in some sense, "all one piece". When a mathematical object has such a property, we say it is connected; otherwise it is disconnected...
but not simply connected. As to the latter, in the ball with antipodal surface points identified, consider the path running from the "north pole" straight through the center down to the south pole. This is a closed loop, since the north pole and the south pole are identified. This loop cannot be shrunk to a point, since no matter how you deform the loop, the start and end point have to remain antipodal, or else the loop will "break open". In terms of rotations, this loop represents a continuous sequence of rotations about the z-axis starting and ending at the identity rotation (i.e. a series of rotation through an angle φ where φ runs from 0 to 2π).
Surprisingly, if you run through the path twice, i.e., from north pole down to south pole and back to the north pole so that φ runs from 0 to 4π, you get a closed loop which can be shrunk to a single point: first move the paths continuously to the ball's surface, still connecting north pole to south pole twice. The second half of the path can then be mirrored over to the antipodal side without changing the path at all. Now we have an ordinary closed loop on the surface of the ball, connecting the north pole to itself along a great circle. This circle can be shrunk to the north pole without problems.
The same argument can be performed in general, and it shows that the fundamental group
Fundamental group
In mathematics, more specifically algebraic topology, the fundamental group is a group associated to any given pointed topological space that provides a way of determining when two paths, starting and ending at a fixed base point, can be continuously deformed into each other...
of SO(3) is cyclic group
Cyclic group
In group theory, a cyclic group is a group that can be generated by a single element, in the sense that the group has an element g such that, when written multiplicatively, every element of the group is a power of g .-Definition:A group G is called cyclic if there exists an element g...
of order 2. In physics
Physics
Physics is a natural science that involves the study of matter and its motion through spacetime, along with related concepts such as energy and force. More broadly, it is the general analysis of nature, conducted in order to understand how the universe behaves.Physics is one of the oldest academic...
applications, the non-triviality of the fundamental group allows for the existence of objects known as spinor
Spinor
In mathematics and physics, in particular in the theory of the orthogonal groups , spinors are elements of a complex vector space introduced to expand the notion of spatial vector. Unlike tensors, the space of spinors cannot be built up in a unique and natural way from spatial vectors...
s, and is an important tool in the development of the spin-statistics theorem
Spin-statistics theorem
In quantum mechanics, the spin-statistics theorem relates the spin of a particle to the particle statistics it obeys. The spin of a particle is its intrinsic angular momentum...
.
The universal cover of SO(3) is a Lie group
Lie group
In mathematics, a Lie group is a group which is also a differentiable manifold, with the property that the group operations are compatible with the smooth structure...
called Spin(3). The group Spin(3) is isomorphic to the special unitary group
Special unitary group
The special unitary group of degree n, denoted SU, is the group of n×n unitary matrices with determinant 1. The group operation is that of matrix multiplication...
SU(2); it is also diffeomorphic to the unit 3-sphere
3-sphere
In mathematics, a 3-sphere is a higher-dimensional analogue of a sphere. It consists of the set of points equidistant from a fixed central point in 4-dimensional Euclidean space...
S3 and can be understood as the group of unit quaternions
Quaternion
In mathematics, the quaternions are a number system that extends the complex numbers. They were first described by Irish mathematician Sir William Rowan Hamilton in 1843 and applied to mechanics in three-dimensional space...
(i.e. those with absolute value
Absolute value
In mathematics, the absolute value |a| of a real number a is the numerical value of a without regard to its sign. So, for example, the absolute value of 3 is 3, and the absolute value of -3 is also 3...
1). The connection between quaternions and rotations, commonly exploited in computer graphics
Computer graphics
Computer graphics are graphics created using computers and, more generally, the representation and manipulation of image data by a computer with help from specialized software and hardware....
, is explained in quaternions and spatial rotation
Quaternions and spatial rotation
Unit quaternions provide a convenient mathematical notation for representing orientations and rotations of objects in three dimensions. Compared to Euler angles they are simpler to compose and avoid the problem of gimbal lock. Compared to rotation matrices they are more numerically stable and may...
s. The map from S3 onto SO(3) that identifies antipodal points of S3 is a surjective homomorphism
Homomorphism
In abstract algebra, a homomorphism is a structure-preserving map between two algebraic structures . The word homomorphism comes from the Greek language: ὁμός meaning "same" and μορφή meaning "shape".- Definition :The definition of homomorphism depends on the type of algebraic structure under...
of Lie groups, with kernel
Kernel (algebra)
In the various branches of mathematics that fall under the heading of abstract algebra, the kernel of a homomorphism measures the degree to which the homomorphism fails to be injective. An important special case is the kernel of a matrix, also called the null space.The definition of kernel takes...
{±1}. Topologically, this map is a two-to-one covering map
Covering map
In mathematics, more specifically algebraic topology, a covering map is a continuous surjective function p from a topological space, C, to a topological space, X, such that each point in X has a neighbourhood evenly covered by p...
.
See also
- Atlas (topology)Atlas (topology)In mathematics, particularly topology, one describesa manifold using an atlas. An atlas consists of individualcharts that, roughly speaking, describe individual regionsof the manifold. If the manifold is the surface of the Earth,...
- Rotation (mathematics)Rotation (mathematics)In geometry and linear algebra, a rotation is a transformation in a plane or in space that describes the motion of a rigid body around a fixed point. A rotation is different from a translation, which has no fixed points, and from a reflection, which "flips" the bodies it is transforming...
- Rotation representationRotation representation (mathematics)In geometry a rotation representation expresses a rotation as a mathematical transformation. In physics, this concept extends to classical mechanics where rotational kinematics is the science of describing with numbers the purely rotational motion of an object.According to Euler's rotation theorem...