

Inertial navigation system
Encyclopedia
Navigation
Navigation is the process of monitoring and controlling the movement of a craft or vehicle from one place to another. It is also the term of art used for the specialized knowledge used by navigators to perform navigation tasks...
aid that uses a computer
Computer
A computer is a programmable machine designed to sequentially and automatically carry out a sequence of arithmetic or logical operations. The particular sequence of operations can be changed readily, allowing the computer to solve more than one kind of problem...
, motion sensors (accelerometer
Accelerometer
An accelerometer is a device that measures proper acceleration, also called the four-acceleration. This is not necessarily the same as the coordinate acceleration , but is rather the type of acceleration associated with the phenomenon of weight experienced by a test mass that resides in the frame...
s) and rotation sensors (gyroscopes) to continuously calculate via dead reckoning
Dead reckoning
In navigation, dead reckoning is the process of calculating one's current position by using a previously determined position, or fix, and advancing that position based upon known or estimated speeds over elapsed time, and course...
the position, orientation, and velocity
Velocity
In physics, velocity is speed in a given direction. Speed describes only how fast an object is moving, whereas velocity gives both the speed and direction of the object's motion. To have a constant velocity, an object must have a constant speed and motion in a constant direction. Constant ...
(direction and speed of movement) of a moving object without the need for external references. It is used on vehicles such as ship
Ship
Since the end of the age of sail a ship has been any large buoyant marine vessel. Ships are generally distinguished from boats based on size and cargo or passenger capacity. Ships are used on lakes, seas, and rivers for a variety of activities, such as the transport of people or goods, fishing,...
s, aircraft
Aircraft
An aircraft is a vehicle that is able to fly by gaining support from the air, or, in general, the atmosphere of a planet. An aircraft counters the force of gravity by using either static lift or by using the dynamic lift of an airfoil, or in a few cases the downward thrust from jet engines.Although...
, submarine
Submarine
A submarine is a watercraft capable of independent operation below the surface of the water. It differs from a submersible, which has more limited underwater capability...
s, guided missile
Guided Missile
Guided Missile is a London based independent record label set up by Paul Kearney in 1994.Guided Missile has always focused on 'the underground', preferring to put out a steady flow of releases and developing the numerous GM events around London and beyond....
s, and spacecraft
Spacecraft
A spacecraft or spaceship is a craft or machine designed for spaceflight. Spacecraft are used for a variety of purposes, including communications, earth observation, meteorology, navigation, planetary exploration and transportation of humans and cargo....
. Other terms used to refer to inertial navigation systems or closely related devices include inertial guidance system, inertial reference platform, inertial instrument, inertial measurement unit
Inertial measurement unit
An inertial measurement unit, or IMU, is an electronic device that measures and reports on a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers and gyroscopes. IMUs are typically used to maneuver aircraft, including UAVs, among many others, and...
(IMU) and many other variations.
Overview
An inertial navigation system includes at least a computer and a platform or module containing accelerometerAccelerometer
An accelerometer is a device that measures proper acceleration, also called the four-acceleration. This is not necessarily the same as the coordinate acceleration , but is rather the type of acceleration associated with the phenomenon of weight experienced by a test mass that resides in the frame...
s, gyroscope
Gyroscope
A gyroscope is a device for measuring or maintaining orientation, based on the principles of angular momentum. In essence, a mechanical gyroscope is a spinning wheel or disk whose axle is free to take any orientation...
s, or other motion-sensing devices. The INS is initially provided with its position and velocity from another source (a human operator, a GPS satellite receiver, etc.), and thereafter computes its own updated position and velocity by integrating information received from the motion sensors. The advantage of an INS is that it requires no external references in order to determine its position, orientation, or velocity once it has been initialized.
An INS can detect a change in its geographic position (a move east or north, for example), a change in its velocity (speed and direction of movement), and a change in its orientation (rotation about an axis). It does this by measuring the linear and angular acceleration
Acceleration
In physics, acceleration is the rate of change of velocity with time. In one dimension, acceleration is the rate at which something speeds up or slows down. However, since velocity is a vector, acceleration describes the rate of change of both the magnitude and the direction of velocity. ...
s applied to the system. Since it requires no external reference (after initialization), it is immune to jamming
Radar jamming and deception
Radar jamming and deception is the intentional emission of radio frequency signals to interfere with the operation of a radar by saturating its receiver with noise or false information...
and deception.
Inertial-navigation systems are used in many different moving objects, including vehicles—such as aircraft
Aircraft
An aircraft is a vehicle that is able to fly by gaining support from the air, or, in general, the atmosphere of a planet. An aircraft counters the force of gravity by using either static lift or by using the dynamic lift of an airfoil, or in a few cases the downward thrust from jet engines.Although...
, submarine
Submarine
A submarine is a watercraft capable of independent operation below the surface of the water. It differs from a submersible, which has more limited underwater capability...
s, spacecraft
Spacecraft
A spacecraft or spaceship is a craft or machine designed for spaceflight. Spacecraft are used for a variety of purposes, including communications, earth observation, meteorology, navigation, planetary exploration and transportation of humans and cargo....
—and guided missile
Guided Missile
Guided Missile is a London based independent record label set up by Paul Kearney in 1994.Guided Missile has always focused on 'the underground', preferring to put out a steady flow of releases and developing the numerous GM events around London and beyond....
s. However, their cost and complexity place constraints on the environments in which they are practical for use.
Gyroscopes measure the angular velocity
Angular velocity
In physics, the angular velocity is a vector quantity which specifies the angular speed of an object and the axis about which the object is rotating. The SI unit of angular velocity is radians per second, although it may be measured in other units such as degrees per second, revolutions per...
of the system in the inertial reference frame. By using the original orientation of the system in the inertial reference frame as the initial condition and integrating
Integral
Integration is an important concept in mathematics and, together with its inverse, differentiation, is one of the two main operations in calculus...
the angular velocity, the system's current orientation is known at all times. This can be thought of as the ability of a blindfolded passenger in a car to feel the car turn left and right or tilt up and down as the car ascends or descends hills. Based on this information alone, he knows what direction the car is facing but not how fast or slow it is moving, or whether it is sliding sideways.
Accelerometers measure the linear acceleration of the system in the inertial reference frame, but in directions that can only be measured relative to the moving system (since the accelerometers are fixed to the system and rotate with the system, but are not aware of their own orientation). This can be thought of as the ability of a blindfolded passenger in a car to feel himself pressed back into his seat as the vehicle accelerates forward or pulled forward as it slows down; and feel himself pressed down into his seat as the vehicle accelerates up a hill or rise up out of his seat as the car passes over the crest of a hill and begins to descend. Based on this information alone, he knows how the vehicle is accelerating relative to itself, that is, whether it is accelerating forward, backward, left, right, up (toward the car's ceiling), or down (toward the car's floor) measured relative to the car, but not the direction relative to the Earth, since he did not know what direction the car was facing relative to the Earth when he felt the accelerations.
However, by tracking both the current angular velocity of the system and the current linear acceleration of the system measured relative to the moving system, it is possible to determine the linear acceleration of the system in the inertial reference frame. Performing integration on the inertial accelerations (using the original velocity as the initial conditions) using the correct kinematic equations yields the inertial velocities of the system, and integration again (using the original position as the initial condition) yields the inertial position. In our example, if the blindfolded passenger knew how the car was pointed and what its velocity was before he was blindfolded, and if he is able to keep track of both how the car has turned and how it has accelerated and decelerated since, he can accurately know the current orientation, position, and velocity of the car at any time.
Error
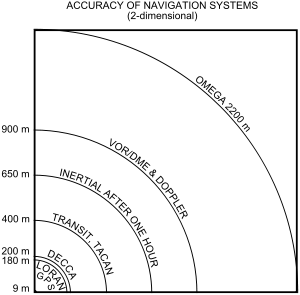
All inertial navigation systems suffer from integration drift: small errors in the measurement of acceleration and angular velocity are integrated into progressively larger errors in velocity, which are compounded into still greater errors in position. Since the new position is calculated from the previous calculated position and the measured acceleration and angular velocity, these errors are cumulative and increase at a rate roughly proportional to the time since the initial position was input. Therefore the position must be periodically corrected by input from some other type of navigation system. The inaccuracy of a good-quality navigational system is normally less than 0.6 nautical miles per hour in position and on the order of tenths of a degree per hour in orientation.Accordingly, inertial navigation is usually used to supplement other navigation systems, providing a higher degree of accuracy than is possible with the use of any single system. For example, if, in terrestrial use, the inertially tracked velocity is intermittently updated to zero by stopping, the position will remain precise for a much longer time, a so-called zero velocity update.
Control theory
Control theory
Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems. The desired output of a system is called the reference...
in general, and Kalman filtering in particular, provide a theoretical framework for combining information from various sensors. One of the most common alternative sensors is a satellite navigation radio, such as GPS. By properly combining the information from an INS and the GPS system (GPS/INS
GPS/INS
GPS/INS refers to the use of GPS satellite signals to correct or calibrate a solution from an Inertial Navigation System . Inertial navigation systems usually can only provide an accurate solution for a short period of time. The INS accelerometers will produce an unknown bias signal that appears...
), the errors in position and velocity are stable
Numerical stability
In the mathematical subfield of numerical analysis, numerical stability is a desirable property of numerical algorithms. The precise definition of stability depends on the context, but it is related to the accuracy of the algorithm....
. Furthermore, INS can be used as a short-term fallback while GPS signals are unavailable, for example when a vehicle passes through a tunnel.
History
Inertial navigation systems were originally developed for rocketRocket
A rocket is a missile, spacecraft, aircraft or other vehicle which obtains thrust from a rocket engine. In all rockets, the exhaust is formed entirely from propellants carried within the rocket before use. Rocket engines work by action and reaction...
s. American rocket pioneer Robert Goddard experimented with rudimentary gyroscopic
Gyroscope
A gyroscope is a device for measuring or maintaining orientation, based on the principles of angular momentum. In essence, a mechanical gyroscope is a spinning wheel or disk whose axle is free to take any orientation...
systems. Dr. Goddard's systems were of great interest to contemporary German pioneers including Wernher von Braun
Wernher von Braun
Wernher Magnus Maximilian, Freiherr von Braun was a German rocket scientist, aerospace engineer, space architect, and one of the leading figures in the development of rocket technology in Nazi Germany during World War II and in the United States after that.A former member of the Nazi party,...
. The systems entered more widespread use with the advent of spacecraft
Spacecraft
A spacecraft or spaceship is a craft or machine designed for spaceflight. Spacecraft are used for a variety of purposes, including communications, earth observation, meteorology, navigation, planetary exploration and transportation of humans and cargo....
, guided missile
Guided Missile
Guided Missile is a London based independent record label set up by Paul Kearney in 1994.Guided Missile has always focused on 'the underground', preferring to put out a steady flow of releases and developing the numerous GM events around London and beyond....
s, and commercial airliner
Airliner
An airliner is a large fixed-wing aircraft for transporting passengers and cargo. Such aircraft are operated by airlines. Although the definition of an airliner can vary from country to country, an airliner is typically defined as an aircraft intended for carrying multiple passengers in commercial...
s.
Early German World War II
World War II
World War II, or the Second World War , was a global conflict lasting from 1939 to 1945, involving most of the world's nations—including all of the great powers—eventually forming two opposing military alliances: the Allies and the Axis...
V2 guidance systems combined two gyroscopes and a lateral accelerometer with a simple analog computer to adjust the azimuth for the rocket in flight. Analog computer signals were used to drive four external rudders on the tail fins for flight control. The GN&C (Guidance, Navigation, and Control) system for V2 provided many innovations as an integrated platform with closed loop guidance. At the end of the war Von Braun engineered the surrender of 500 of his top rocket scientists, along with plans and test vehicles, to the Americans. They arrived at Fort Bliss, Texas in 1945 under the provisions of Operation Paperclip
Operation Paperclip
Operation Paperclip was the Office of Strategic Services program used to recruit the scientists of Nazi Germany for employment by the United States in the aftermath of World War II...
and were subsequently moved to Huntsville, Alabama, in 1950 where they worked for U.S. military rocket research programs.
In the early 1950s, the US government wanted to insulate itself against over dependency on the German team for military applications. Among the areas that were domestically "developed" was missile guidance. In the early 1950s the MIT Instrumentation Laboratory (later to become the Charles Stark Draper Laboratory
Charles Stark Draper Laboratory
Draper Laboratory is an American not-for-profit research and development organization in Cambridge, Massachusetts. Draper focuses on the design, development, and deployment of advanced technology solutions to problems in national security, space exploration, health care and energy.Originally...
, Inc.) was chosen by the Air Force Western Development Division to provide a self-contained guidance system backup to Convair in San Diego for the new Atlas intercontinental ballistic missile (Construction and testing were completed by Arma Division of AmBosch Arma). The technical monitor for the MIT task was a young engineer named Jim Fletcher who later served as the NASA Administrator. The Atlas guidance system was to be a combination of an on-board autonomous system, and a ground-based tracking and command system. This was the beginning of a philosophic controversy, which, in some areas, remains unresolved. The self-contained system finally prevailed in ballistic missile applications for obvious reasons. In space exploration, a mixture of the two remains.
In the summer of 1952, Dr. Richard Battin and Dr. J. Halcombe "Hal" Laning, Jr.
J. Halcombe Laning
Dr. J. Halcombe "Hal" Laning Jr. was a Massachusetts Institute of Technology computer pioneer who in 1952 invented an algebraic compiler called George that ran on the MIT Whirlwind, the first real-time computer...
, researched computational based solutions to guidance. Dr. Laning, with the help of Phil Hankins and Charlie Werner, initiated work on MAC, an algebraic programming language for the IBM 650
IBM 650
The IBM 650 was one of IBM’s early computers, and the world’s first mass-produced computer. It was announced in 1953, and over 2000 systems were produced between the first shipment in 1954 and its final manufacture in 1962...
, which was completed by early spring of 1958. MAC became the work-horse of the MIT lab. MAC is an extremely readable language having a three-line format, vector-matrix notations and mnemonic and indexed subscripts. Today's Space Shuttle
Space Shuttle
The Space Shuttle was a manned orbital rocket and spacecraft system operated by NASA on 135 missions from 1981 to 2011. The system combined rocket launch, orbital spacecraft, and re-entry spaceplane with modular add-ons...
(STS) language called HAL/S
HAL/S
HAL/S is a real-time aerospace programming language, best known for its use in the Space Shuttle program. It was designed by Intermetrics in the 1970s for NASA. HAL/S is written in XPL, a dialect of PL/I....
, (developed by Intermetrics, Inc.) is a direct offshoot of MAC. Since the principal architect of HAL was Jim Miller, who co-authored a report on the MAC system with Hal Laning, it is probable the Space Shuttle language is named for Laning and not, as some have suggested, for the electronic star
HAL 9000
HAL 9000 is the antagonist in Arthur C. Clarke's science fiction Space Odyssey saga. HAL is an artificial intelligence that interacts with the astronaut crew of the Discovery One spacecraft, usually represented as a red television-camera eye found throughout the ship...
of Stanley Kubrick's 2001: A Space Odyssey'
2001: A Space Odyssey (film)
2001: A Space Odyssey is a 1968 epic science fiction film produced and directed by Stanley Kubrick, and co-written by Kubrick and Arthur C. Clarke, partially inspired by Clarke's short story The Sentinel...
'.
Hal Laning and Richard Battin undertook the initial analytical work on the Atlas inertial guidance in 1954. Other key figures at Convair were Charlie Bossart, the Chief Engineer, and Walter Schweidetzky, head of the guidance group. Schweidetzky had worked with Wernher von Braun at Peenemuende during World War II.
The initial Delta guidance system assessed the difference in position from a reference trajectory. A velocity to be gained (VGO) calculation is made to correct the current trajectory with the objective of driving VGO to zero. The mathematics of this approach were fundamentally valid, but dropped because of the challenges in accurate inertial guidance and analog computing power. The challenges faced by the Delta efforts were overcome by the Q system (see Q-guidance
Q-guidance
Q-guidance is a method of missile guidance used in some U.S. ballistic missiles and some civilian space flights. It was developed in the 1950's by J...
) of guidance. The Q system's revolution was to bind the challenges of missile guidance (and associated equations of motion) in the matrix Q. The Q matrix represents the partial derivatives of the velocity with respect to the position vector. A key feature of this approach allowed for the components of the vector cross product (v, xdv, /dt) to be used as the basic autopilot rate signals—a technique that became known as cross-product steering. The Q-system was presented at the first Technical Symposium on Ballistic Missiles held at the Ramo-Wooldridge Corporation in Los Angeles on June 21 and 22, 1956. The Q system was classified information through the 1960s. Derivations of this guidance are used for today's missiles.
Guidance in Human spaceflight
In Feb of 1961 NASA Awarded MIT a contract for preliminary design study of a guidance and navigation system for Apollo. MIT and the Delco Electronics Div. of General Motors Corp. were awarded the joint contract for design and production of the Apollo Guidance and Navigation systems for the Command Module and the Lunar Module. Delco produced the IMUs (Inertial Measurement UnitInertial measurement unit
An inertial measurement unit, or IMU, is an electronic device that measures and reports on a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers and gyroscopes. IMUs are typically used to maneuver aircraft, including UAVs, among many others, and...
s) for these systems, Kollsman Instrument Corp. produced the Optical Systems, and the Apollo Guidance Computer
Apollo Guidance Computer
The Apollo Guidance Computer provided onboard computation and control for guidance, navigation, and control of the Command Module and Lunar Module spacecraft of the Apollo program...
was built by Raytheon under subcontract. (see Apollo on-board guidance, navigation, and control system, Dave Hoag, International Space Hall of Fame Dedication Conference in Alamogordo, N.M., October 1976 ).
For the space shuttle, an open loop (no feedback) guidance is used to guide the shuttle from lift off until Solid Rocket Booster (SRB) separation. After SRB separation the primary space shuttle guidance is named PEG4 (Powered Explicit Guidance). PEG4 takes into account both the Q system and the predictor-corrector attributes of the original "Delta" System (PEG Guidance). Although many updates to the shuttle's navigation system have taken place over the last 30 years (ex. GPS in the OI-22 build), the guidance core of today's Shuttle GN&C system has evolved little. Within a manned system, there is a human interface needed for the guidance system. As Astronauts are the customer for the system, many new teams are formed that touch GN&C as it is a primary interface to "fly" the vehicle.
Aircraft inertial guidance
One example of a popular INS for commercial aircraft was the Delco CarouselDelco Carousel
The Delco Carousel was a popular INS-based navigation automation system for aircraft developed by Delco Electronics. Before the advent of sophisticated flight management systems, the Carousel allowed pilots to automate navigation of an aircraft along a series of waypoints that they entered via a...
, which provided partial automation of navigation in the days before complete flight management system
Flight management system
A flight management system is a fundamental part of a modern airliner's avionics. An FMS is a specialized computer system that automates a wide variety of in-flight tasks, reducing the workload on the flight crew to the point that modern aircraft no longer carry flight engineers or navigators. A...
s became commonplace. The Carousel allowed pilots to enter a series of waypoints, and then guided the aircraft from one waypoint to the next using an INS to determine aircraft position and velocity. Boeing Corporation subcontracted the Delco Electronics Div. of General Motors to design and build the first production Carousel systems for the early models (-100, -200, and -300) models of the 747 aircraft. The 747 utilized three Carousel systems operating in concert for reliablility purposes. The Carousel system and derivatives thereof were subsequently adopted for use in many other commercial and military aircraft. The USAF C-141 was the first military aircraft to utilize the Carousel in a dual system configuration, followed by the C-5A which utilized the triple INS configuration, similar to the 747. The KC-135 fleet was fitted with a dual Carousel system that was aided by a Doppler radar.
Inertial navigation systems in detail

Inertial measurement unit
An inertial measurement unit, or IMU, is an electronic device that measures and reports on a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers and gyroscopes. IMUs are typically used to maneuver aircraft, including UAVs, among many others, and...
s (IMUs) which have angular and linear accelerometers (for changes in position); some IMUs include a gyroscopic element (for maintaining an absolute angular reference).
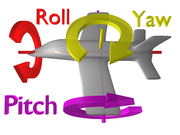
Angular accelerometers measure how the vehicle is rotating in space. Generally, there's at least one sensor for each of the three axes: pitch (nose up and down), yaw (nose left and right) and roll (clockwise or counter-clockwise from the cockpit).
Linear accelerometers measure non-gravitational accelerations of the vehicle. Since it can move in three axes (up & down, left & right, forward & back), there is a linear accelerometer for each axis.
A computer continually calculates the vehicle's current position. First, for each of the six degrees of freedom
Degrees of freedom (engineering)
In mechanics, degrees of freedom are the set of independent displacements and/or rotations that specify completely the displaced or deformed position and orientation of the body or system...
(x,y,z and θx, θy and θz), it integrates over time the sensed acceleration, together with an estimate of gravity, to calculate the current velocity. Then it integrates the velocity to calculate the current position.
Inertial guidance is difficult without computers. The desire to use inertial guidance in the Minuteman missile and Project Apollo
Project Apollo
The Apollo program was the spaceflight effort carried out by the United States' National Aeronautics and Space Administration , that landed the first humans on Earth's Moon. Conceived during the Presidency of Dwight D. Eisenhower, Apollo began in earnest after President John F...
drove early attempts to miniaturize computers.
Inertial guidance systems are now usually combined with satellite navigation systems through a digital filtering system. The inertial system provides short term data, while the satellite system corrects accumulated errors of the inertial system.
An inertial guidance system that will operate near the surface
of the earth must incorporate Schuler tuning
Schuler tuning
Schuler tuning is a modification to the electronic control system used in inertial navigation systems that accounts for the curvature of the Earth. An inertial navigation system, used in submarines, ships, aircraft, and other vehicles to keep track of position, determines directions with respect...
so that its
platform will continue pointing towards the center of the earth
as a vehicle moves from place to place.
Gimballed gyrostabilized platforms
Some systems place the linear accelerometers on a gimbaled gyrostabilized platform. The gimbalGimbal
A gimbal is a pivoted support that allows the rotation of an object about a single axis. A set of two gimbals, one mounted on the other with pivot axes orthogonal, may be used to allow an object mounted on the innermost gimbal to remain immobile regardless of the motion of its support...
s are a set of three rings, each with a pair of bearings initially at right angles. They let the platform twist about any rotational axis (or, rather, they let the platform keep the same orientation while the vehicle rotates around it). There are two gyroscope
Gyroscope
A gyroscope is a device for measuring or maintaining orientation, based on the principles of angular momentum. In essence, a mechanical gyroscope is a spinning wheel or disk whose axle is free to take any orientation...
s (usually) on the platform.
Two gyroscopes are used to cancel gyroscopic precession
Precession
Precession is a change in the orientation of the rotation axis of a rotating body. It can be defined as a change in direction of the rotation axis in which the second Euler angle is constant...
, the tendency of a gyroscope to twist at right angles to an input force. By mounting a pair of gyroscopes (of the same rotational inertia and spinning at the same speed) at right angles the precessions are cancelled, and the platform will resist twisting.
This system allows a vehicle's roll, pitch, and yaw angles to be measured directly at the bearings of the gimbals. Relatively simple electronic circuits can be used to add up the linear accelerations, because the directions of the linear accelerometers do not change.
The big disadvantage of this scheme is that it uses many expensive precision mechanical parts. It also has moving parts
Moving parts
The moving parts of a machine are those parts of it that move. Machines comprise both moving and fixed parts. The moving parts have controlled and constrained motions....
that can wear out or jam, and is vulnerable to gimbal lock
Gimbal lock
Gimbal lock is the loss of one degree of freedom in a three-dimensional space that occurs when the axes of two of the three gimbals are driven into a parallel configuration, "locking" the system into rotation in a degenerate two-dimensional space....
. The primary guidance system
Apollo PGNCS
The Apollo Primary Guidance, Navigation and Control System was a self-contained inertial guidance system that allowed Apollo spacecraft to carry out their missions when communications with Earth were interrupted, either as expected, when the spacecraft were behind the moon, or in case of a...
of the Apollo spacecraft
Apollo spacecraft
The Apollo spacecraft was composed of five combined parts designed to accomplish the American Apollo program's goal of landing astronauts on the Moon by the end of the 1960s and returning them safely to Earth...
used a three-axis gyrostabilized platform, feeding data to the Apollo Guidance Computer
Apollo Guidance Computer
The Apollo Guidance Computer provided onboard computation and control for guidance, navigation, and control of the Command Module and Lunar Module spacecraft of the Apollo program...
. Maneuvers had to be carefully planned to avoid gimbal lock.
Fluid-suspended gyrostabilized platforms
Gimbal lock constrains maneuvering, and it would be beneficial to eliminate the slip rings and bearings of the gimbals. Therefore, some systems use fluid bearings or a flotation chamber to mount a gyrostabilized platform. These systems can have very high precisions (e.g., Advanced Inertial Reference SphereAdvanced Inertial Reference Sphere
The Advanced Inertial Reference Sphere, or AIRS, is a highly accurate inertial guidance system designed for use in the LGM-118A Peacekeeper ICBM which was intended for precision nuclear strike against Soviet missile silos.-Details:...
). Like all gyrostabilized platforms, this system runs well with relatively slow, low-power computers.
The fluid bearings are pads with holes through which pressurized inert gas (such as Helium) or oil press against the spherical shell of the platform. The fluid bearings are very slippery, and the spherical platform can turn freely. There are usually four bearing pads, mounted in a tetrahedral arrangement to support the platform.
In premium systems, the angular sensors are usually specialized transformer
Linear variable differential transformer
The Linear Variable Differential Transformer is a type of electrical transformer used for measuring linear displacement. A counterpart to this device that is used for measuring rotary displacement is called a Rotary Variable Differential Transformer...
coils made in a strip on a flexible printed circuit board
Printed circuit board
A printed circuit board, or PCB, is used to mechanically support and electrically connect electronic components using conductive pathways, tracks or signal traces etched from copper sheets laminated onto a non-conductive substrate. It is also referred to as printed wiring board or etched wiring...
. Several coil strips are mounted on great circle
Great circle
A great circle, also known as a Riemannian circle, of a sphere is the intersection of the sphere and a plane which passes through the center point of the sphere, as opposed to a general circle of a sphere where the plane is not required to pass through the center...
s around the spherical shell of the gyrostabilized platform. Electronics outside the platform uses similar strip-shaped transformers to read the varying magnetic fields produced by the transformers wrapped around the spherical platform. Whenever a magnetic field changes shape, or moves, it will cut the wires of the coils on the external transformer strips. The cutting generates an electric current in the external strip-shaped coils, and electronics can measure that current to derive angles.
Cheap systems sometimes use bar codes to sense orientations, and use solar cell
Solar cell
A solar cell is a solid state electrical device that converts the energy of light directly into electricity by the photovoltaic effect....
s or a single transformer to power the platform. Some small missiles have powered the platform with light from a window or optic fibers to the motor. A research topic is to suspend the platform with pressure from exhaust gases. Data is returned to the outside world via the transformers, or sometimes LED
LEd
LEd is a TeX/LaTeX editing software working under Microsoft Windows. It is a freeware product....
s communicating with external photodiode
Photodiode
A photodiode is a type of photodetector capable of converting light into either current or voltage, depending upon the mode of operation.The common, traditional solar cell used to generateelectric solar power is a large area photodiode....
s.
Strapdown systems
Lightweight digital computers permit the system to eliminate the gimbals, creating strapdownStrapdown
The strapdown is an alternative to the gimbal used in inertial navigation system . It is mechanically simpler, but has drawbacks as a result.-External links:*...
systems, so called because their sensors are simply strapped to the vehicle. This reduces the cost, eliminates gimbal lock
Gimbal lock
Gimbal lock is the loss of one degree of freedom in a three-dimensional space that occurs when the axes of two of the three gimbals are driven into a parallel configuration, "locking" the system into rotation in a degenerate two-dimensional space....
, removes the need for some calibrations, and increases the reliability by eliminating some of the moving parts. Angular rate sensors called rate gyros measure how the angular velocity of the vehicle changes.
A strapdown system has a dynamic measurement range several hundred times that required by a gimbaled system. That is, it must integrate the vehicle's attitude changes in pitch, roll and yaw, as well as gross movements. Gimballed systems could usually do well with update rates of 50–60 Hz. However, strapdown systems normally update about 2000 Hz. The higher rate is needed to keep the maximum angular measurement within a practical range for real rate gyros: about 4 milliradians. Most rate gyros are now laser interferometers.
The data updating algorithms (direction cosines or quaternion
Quaternion
In mathematics, the quaternions are a number system that extends the complex numbers. They were first described by Irish mathematician Sir William Rowan Hamilton in 1843 and applied to mechanics in three-dimensional space...
s) involved are too complex to be accurately performed except by digital electronics. However, digital computers are now so inexpensive and fast that rate gyro systems can now be practically used and mass-produced. The Apollo lunar module used a strapdown system in its backup Abort Guidance System (AGS).
Strapdown systems are nowadays commonly used in commercial and tactical applications (aircraft, missile
Missile
Though a missile may be any thrown or launched object, it colloquially almost always refers to a self-propelled guided weapon system.-Etymology:The word missile comes from the Latin verb mittere, meaning "to send"...
s, etc.). However they are still not widespread in applications where superb accuracy is required (like submarine
Submarine
A submarine is a watercraft capable of independent operation below the surface of the water. It differs from a submersible, which has more limited underwater capability...
navigation or strategic ICBM guidance).
Motion-based alignment
The orientation of a gyroscope system can sometimes also be inferred simply from its position history (e.g., GPS). This is, in particular, the case with planes and cars, where the velocity vector usually implies the orientation of the vehicle body.For example, Honeywell
Honeywell
Honeywell International, Inc. is a major conglomerate company that produces a variety of consumer products, engineering services, and aerospace systems for a wide variety of customers, from private consumers to major corporations and governments....
's Align in Motion is an initialization process where the initialization occurs while the aircraft is moving, in the air or on the ground. This is accomplished using GPS and an inertial reasonableness test, thereby allowing commercial data integrity requirements to be met. This process has been FAA certified to recover pure INS performance equivalent to stationary align procedures for civilian flight times up to 18 hours.
It avoids the need for gyroscope batteries on aircraft.
Vibrating gyros
Less-expensive navigation systems, intended for use in automobiles, may use a vibrating structure gyroscopeVibrating structure gyroscope
A vibrating structure gyroscope is a type ofgyroscope that functions much like the halteresof an insect.The underlying physical principle is that a vibratingobject tends to continue vibrating in the same planeas its support rotates...
to detect changes in heading, and the odometer pickup to measure distance covered along the vehicle's track. This type of system is much less accurate than a higher-end INS, but it is adequate for the typical automobile application where GPS is the primary navigation system, and dead reckoning
Dead reckoning
In navigation, dead reckoning is the process of calculating one's current position by using a previously determined position, or fix, and advancing that position based upon known or estimated speeds over elapsed time, and course...
is only needed to fill gaps in GPS coverage when buildings or terrain block the satellite signals.
Hemispherical Resonator Gyros (wine glass or mushroom gyros)
If a standing wave is induced in a hemispheric resonant cavity, and then the resonant cavity is rotated, the spherical harmonic standing wave rotates through an angle different than the quartz resonator structure due to the Coriolis force. The movement of the outer case with respect to the standing wave pattern is proportional to the total rotation angle and can be sensed by appropriate electronics. The system resonators are machined from quartzQuartz
Quartz is the second-most-abundant mineral in the Earth's continental crust, after feldspar. It is made up of a continuous framework of SiO4 silicon–oxygen tetrahedra, with each oxygen being shared between two tetrahedra, giving an overall formula SiO2. There are many different varieties of quartz,...
due to its excellent mechanical properties. The electrodes that drive and sense the standing waves are deposited directly onto separate quartz structures that surround the resonator. These gyros can operate in either a whole angle mode (which gives them nearly unlimited rate capability) or a force rebalance mode that holds the standing wave in a fixed orientation with respect to the gyro housing (which gives them much better accuracy).
This system has almost no moving parts, and is very accurate. However it is still relatively expensive due to the cost of the precision ground and polished hollow quartz hemispheres. Northrop Grumman currently manufactures IMUs (Inertial Measurement Units) for spacecraft that use HRGs. These IMUs have demonstrated extremely high reliability since their initial use in 1996. See for a picture of an HRG.
Quartz rate sensors
This system is usually integrated on a silicon chip. It has two mass-balanced quartz tuning forks, arranged "handle-to-handle" so forces cancel. Aluminum electrodes evaporated onto the forks and the underlying chip both drive and sense the motion. The system is both manufacturable and inexpensive. Since quartz is dimensionally stable, the system can be accurate.As the forks are twisted about the axis of the handle, the vibration of the tines tends to continue in the same plane of motion. This motion has to be resisted by electrostatic forces from the electrodes under the tines. By measuring the difference in capacitance between the two tines of a fork, the system can determine the rate of angular motion.
These products include 'tuning fork gyros'. Gyro is designed as an electronically-driven tuning fork, often fabricated out of a single piece of quartz or silicon. Such gyros operate in accordance with the dynamic theory that when an angle rate is applied to a translating body, a Coriolis force is generated.
Current state of the art non-military technology can build small solid state sensors that can measure human body movements. These devices have no moving parts, and weigh about 50 grams.
Solid state devices using the same physical principles are used for image stabilization
Image stabilization
Image stabilization is a family of techniques used to reduce blurring associated with the motion of a camera during exposure. Specifically, it compensates for pan and tilt of a camera or other imaging device. It is used in image-stabilized binoculars, still and video cameras, and astronomical...
in small cameras or camcorders. These can be extremely small (≈5 mm) and are built with Microelectromechanical systems
Microelectromechanical systems
Microelectromechanical systems is the technology of very small mechanical devices driven by electricity; it merges at the nano-scale into nanoelectromechanical systems and nanotechnology...
(MEMS) technologies.
MHD sensor
Sensors based on magnetohydrodynamic principlesMagnetohydrodynamics
Magnetohydrodynamics is an academic discipline which studies the dynamics of electrically conducting fluids. Examples of such fluids include plasmas, liquid metals, and salt water or electrolytes...
can be used to measure angular velocities.
Laser gyros
A ring laser gyro splits a beam of laserLaser
A laser is a device that emits light through a process of optical amplification based on the stimulated emission of photons. The term "laser" originated as an acronym for Light Amplification by Stimulated Emission of Radiation...
light into two beams in opposite directions through narrow tunnels in a closed optical circular path around the perimeter of a triangular block of temperature-stable Cervit glass with reflecting mirrors placed in each corner. When the gyro is rotating at some angular rate, the distance traveled by each beam becomes different—the shorter path being opposite to the rotation. The phase-shift between the two beams can be measured by an interferometer, and is proportional to the rate of rotation (Sagnac effect
Sagnac effect
The Sagnac effect , named after French physicist Georges Sagnac, is a phenomenon encountered in interferometry that is elicited by rotation. The Sagnac effect manifests itself in a setup called ring interferometry. A beam of light is split and the two beams are made to follow a trajectory in...
).
In practice, at low rotation rates the output frequency can drop to zero after the result of back scattering causing the beams to synchronise and lock together. This is known as a lock-in, or laser-lock. The result is that there is no change in the interference pattern, and therefore no measurement change.
To unlock the counter-rotating light beams, laser gyros either have independent light paths for the two directions (usually in fiber optic gyros), or the laser gyro is mounted on a piezo-electric dither motor that rapidly vibrates the laser ring back and forth about its input axis through the lock-in region to decouple the light waves.
The shaker is the most accurate, because both light beams use exactly the same path. Thus laser gyros retain moving parts, but they do not move as far.
Pendular accelerometers
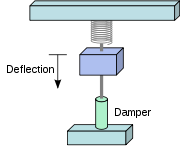
A closed-loop accelerometer achieves higher performance by using a feedback loop to cancel the deflection, thus keeping the mass nearly stationary. Whenever the mass deflects, the feedback loop causes an electric coil to apply an equally negative force on the mass, canceling the motion. Acceleration is derived from the amount of negative force applied. Because the mass barely moves, the non-linearities of the spring and damping system are greatly reduced. In addition, this accelerometer provides for increased bandwidth past the natural frequency of the sensing element.
Both types of accelerometers have been manufactured as integrated micro-machinery on silicon chips.
Methodology
In one form, the navigational system of equations acquires linear and angular measurements from the inertial and body frame, respectively and calculates the final attitude and position in the NEDNorth East Down
North east down , also known as local tangent plane , is a geographical coordinate system for representing state vectors that is commonly used in aviation. It consists of three numbers: one represents the position along the northern axis, one along the eastern axis, and one represents vertical...
frame of reference.
Where:
f is specific force,
 is angular rate, a is acceleration, R is position,
is angular rate, a is acceleration, R is position,  and V are velocity,
and V are velocity,  is the angular velocity of the earth, g is the acceleration due to gravity,
is the angular velocity of the earth, g is the acceleration due to gravity,  and h are the NED location parameters. Also, super/subscripts of E, I and B are representing variables in the Earth centered, Inertial or Body reference frame, respectively and C is a transformation of reference frames.
and h are the NED location parameters. Also, super/subscripts of E, I and B are representing variables in the Earth centered, Inertial or Body reference frame, respectively and C is a transformation of reference frames.See also
- Adam Air Flight 574Adam Air Flight 574Adam Air Flight 574 was a scheduled domestic passenger flight operated by Adam Air between the Indonesian cities of Surabaya and Manado that disappeared near Polewali in Sulawesi on 1 January 2007. The plane, a Boeing 737-4Q8, was ultimately determined to have crashed into the ocean, from...
- AircraftAircraftAn aircraft is a vehicle that is able to fly by gaining support from the air, or, in general, the atmosphere of a planet. An aircraft counters the force of gravity by using either static lift or by using the dynamic lift of an airfoil, or in a few cases the downward thrust from jet engines.Although...
- Attitude control
- Dead reckoningDead reckoningIn navigation, dead reckoning is the process of calculating one's current position by using a previously determined position, or fix, and advancing that position based upon known or estimated speeds over elapsed time, and course...
- Fibre optic gyroscopeFibre optic gyroscopeA fibre optic gyroscope senses changes in orientation, thus performing the function of a mechanical gyroscope. However its principle of operation is instead based on the interference of light which has passed through a coil of optical fibre which can be as long as 5 km.Two beams from a laser...
- Guidance systems
- Inertial measurement unitInertial measurement unitAn inertial measurement unit, or IMU, is an electronic device that measures and reports on a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers and gyroscopes. IMUs are typically used to maneuver aircraft, including UAVs, among many others, and...
(IMU) - Kalman filterKalman filterIn statistics, the Kalman filter is a mathematical method named after Rudolf E. Kálmán. Its purpose is to use measurements observed over time, containing noise and other inaccuracies, and produce values that tend to be closer to the true values of the measurements and their associated calculated...
- Korean Air Lines Flight 007
- PIGA accelerometerPIGA accelerometerA PIG accelerometer is a type of accelerometer that can measure acceleration and simultaneously integrates this acceleration against time to produce a speed measure as well. The PIGA's main use is in Inertial Navigation Systems for guidance of aircraft and most particularly for ballistic missile...
- Rate integrating gyroscopeRate integrating gyroscopeA Rate integrating gyroscope is a rate gyro with a built in integrator. It is usually a component of an Inertial Measurement Unit or a stabilization system.-Principle of operation:...
- Schuler tuningSchuler tuningSchuler tuning is a modification to the electronic control system used in inertial navigation systems that accounts for the curvature of the Earth. An inertial navigation system, used in submarines, ships, aircraft, and other vehicles to keep track of position, determines directions with respect...
- SIGISigiIn the Völsung cycle, Sigi is the ancestor of the Völsung lineage. In the Völsunga saga , he is said to be one of the sons of Odin. He is also listed among Odin's sons in the Nafnaþulur. He had a son called Rerir....
- SpacecraftSpacecraftA spacecraft or spaceship is a craft or machine designed for spaceflight. Spacecraft are used for a variety of purposes, including communications, earth observation, meteorology, navigation, planetary exploration and transportation of humans and cargo....
- LN-3 Inertial Navigation SystemLN-3 Inertial Navigation SystemThe LN-3 Inertial Navigation System is an Inertial Navigation System that was developed in the 1960s by Litton Industries. The Lockheed F-104 Starfighter was the first supersonic fighter aircraft to be equipped with this Inertial Navigation System...