
Curvilinear coordinates
Encyclopedia
Curvilinear coordinates are a coordinate system
for Euclidean space
in which the coordinate lines may be curved. These coordinates may be derived from a set of Cartesian coordinates by using a transformation that is locally invertible (a one-to-one map) at each point. This means that one can convert a point given in a Cartesian coordinate system to its curvilinear coordinates and back. The name curvilinear coordinates, coined by the French mathematician Lamé
, derives from the fact that the coordinate surfaces of the curvilinear systems are curved.
In two dimensional Cartesian coordinates, we can represent a point in space by the coordinates ( ) and in vector form as
) and in vector form as  where
where  are basis vectors. We can describe the same point in curvilinear coordinates in a similar manner, except that the coordinates are now (
are basis vectors. We can describe the same point in curvilinear coordinates in a similar manner, except that the coordinates are now ( ) and the position vector is
) and the position vector is  . The quantities
. The quantities  and
and  are related by the curvilinear transformation
are related by the curvilinear transformation  . The basis vectors
. The basis vectors  and
and  are related by
are related by
The coordinate lines in a curvilinear coordinate systems are level curves of and
and  in the two-dimensional plane.
in the two-dimensional plane.
An example of a curvilinear coordinate system in two-dimensions is the polar coordinate system. In that case the transformation is
Other well-known examples of curvilinear systems are cylindrical
and spherical polar coordinates for R3. While a Cartesian coordinate surface is a plane, e.g., z = 0 defines the x-y plane, the coordinate surface r = 1 in spherical polar coordinates is the surface of a unit sphere in R3—which obviously is curved.
Coordinates are often used to define the location or distribution of physical quantities which may be scalar
s, vectors, or tensor
s. Depending on the application, a curvilinear coordinate system may be simpler to use than the Cartesian coordinate system. For instance, a physical problem with spherical symmetry
defined in R3 (e.g., motion in the field of a point mass/charge), is usually easier to solve in spherical polar coordinates than in Cartesian coordinates. Also boundary conditions may enforce symmetry. One would describe the motion of a particle in a rectangular box in Cartesian coordinates, whereas one would prefer spherical coordinates for a particle in a sphere.
Many of the concepts in vector calculus, which are given in Cartesian or spherical polar coordinates, can be formulated in arbitrary curvilinear coordinates. This gives a certain economy of thought, as it is possible to derive general expressions, valid for any curvilinear coordinate system, for concepts such as the gradient
, divergence
, curl
, and the Laplacian.
on the differentiable manifold
En (n-dimensional Euclidian space) that is diffeomorphic
to the Cartesian
coordinate patch on the manifold. Note that two diffeomorphic coordinate patches on a differential manifold need not overlap differentiably. With this simple definition of a curvilinear coordinate system, all the results that follow below are simply applications of standard theorems in differential topology
.
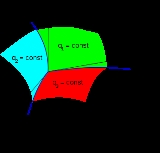
 In Cartesian coordinates, the position of a point P(x,y,z) is determined by the intersection of three mutually perpendicular planes, x = const, y = const, z = const. The coordinates x, y and z are related to three new quantities q1,q2, and q3 by the equations:
In Cartesian coordinates, the position of a point P(x,y,z) is determined by the intersection of three mutually perpendicular planes, x = const, y = const, z = const. The coordinates x, y and z are related to three new quantities q1,q2, and q3 by the equations:
The above equation system can be solved for the arguments q1, q2, and q3 with solutions in the form:
The transformation functions are such that there's a one-to-one relationship between points in the "old" and "new" coordinates, that is, those functions are bijection
s, and fulfil the following requirements within their domains:
Coordinate system
In geometry, a coordinate system is a system which uses one or more numbers, or coordinates, to uniquely determine the position of a point or other geometric element. The order of the coordinates is significant and they are sometimes identified by their position in an ordered tuple and sometimes by...
for Euclidean space
Euclidean space
In mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions...
in which the coordinate lines may be curved. These coordinates may be derived from a set of Cartesian coordinates by using a transformation that is locally invertible (a one-to-one map) at each point. This means that one can convert a point given in a Cartesian coordinate system to its curvilinear coordinates and back. The name curvilinear coordinates, coined by the French mathematician Lamé
Gabriel Lamé
Gabriel Léon Jean Baptiste Lamé was a French mathematician.-Biography:Lamé was born in Tours, in today's département of Indre-et-Loire....
, derives from the fact that the coordinate surfaces of the curvilinear systems are curved.
In two dimensional Cartesian coordinates, we can represent a point in space by the coordinates (
) and in vector form as where are basis vectors. We can describe the same point in curvilinear coordinates in a similar manner, except that the coordinates are now () and the position vector is . The quantities and are related by the curvilinear transformation . The basis vectors and are related byThe coordinate lines in a curvilinear coordinate systems are level curves of
and in the two-dimensional plane.An example of a curvilinear coordinate system in two-dimensions is the polar coordinate system. In that case the transformation is
Other well-known examples of curvilinear systems are cylindrical
Cylindrical coordinate system
A cylindrical coordinate system is a three-dimensional coordinate systemthat specifies point positions by the distance from a chosen reference axis, the direction from the axis relative to a chosen reference direction, and the distance from a chosen reference plane perpendicular to the axis...
and spherical polar coordinates for R3. While a Cartesian coordinate surface is a plane, e.g., z = 0 defines the x-y plane, the coordinate surface r = 1 in spherical polar coordinates is the surface of a unit sphere in R3—which obviously is curved.
Coordinates are often used to define the location or distribution of physical quantities which may be scalar
Scalar (mathematics)
In linear algebra, real numbers are called scalars and relate to vectors in a vector space through the operation of scalar multiplication, in which a vector can be multiplied by a number to produce another vector....
s, vectors, or tensor
Tensor
Tensors are geometric objects that describe linear relations between vectors, scalars, and other tensors. Elementary examples include the dot product, the cross product, and linear maps. Vectors and scalars themselves are also tensors. A tensor can be represented as a multi-dimensional array of...
s. Depending on the application, a curvilinear coordinate system may be simpler to use than the Cartesian coordinate system. For instance, a physical problem with spherical symmetry
Circular symmetry
Circular symmetry in mathematical physics applies to a 2-dimensional field which can be expressed as a function of distance from a central point only. This means that all points on each circle take the same value....
defined in R3 (e.g., motion in the field of a point mass/charge), is usually easier to solve in spherical polar coordinates than in Cartesian coordinates. Also boundary conditions may enforce symmetry. One would describe the motion of a particle in a rectangular box in Cartesian coordinates, whereas one would prefer spherical coordinates for a particle in a sphere.
Many of the concepts in vector calculus, which are given in Cartesian or spherical polar coordinates, can be formulated in arbitrary curvilinear coordinates. This gives a certain economy of thought, as it is possible to derive general expressions, valid for any curvilinear coordinate system, for concepts such as the gradient
Gradient
In vector calculus, the gradient of a scalar field is a vector field that points in the direction of the greatest rate of increase of the scalar field, and whose magnitude is the greatest rate of change....
, divergence
Divergence
In vector calculus, divergence is a vector operator that measures the magnitude of a vector field's source or sink at a given point, in terms of a signed scalar. More technically, the divergence represents the volume density of the outward flux of a vector field from an infinitesimal volume around...
, curl
Curl
In vector calculus, the curl is a vector operator that describes the infinitesimal rotation of a 3-dimensional vector field. At every point in the field, the curl is represented by a vector...
, and the Laplacian.
Curvilinear Coordinates from a mathematical perspective
From a more general and abstract perspective, a curvilinear coordinate system is simply a coordinate patchAtlas (topology)
In mathematics, particularly topology, one describesa manifold using an atlas. An atlas consists of individualcharts that, roughly speaking, describe individual regionsof the manifold. If the manifold is the surface of the Earth,...
on the differentiable manifold
Differentiable manifold
A differentiable manifold is a type of manifold that is locally similar enough to a linear space to allow one to do calculus. Any manifold can be described by a collection of charts, also known as an atlas. One may then apply ideas from calculus while working within the individual charts, since...
En (n-dimensional Euclidian space) that is diffeomorphic
Diffeomorphism
In mathematics, a diffeomorphism is an isomorphism in the category of smooth manifolds. It is an invertible function that maps one differentiable manifold to another, such that both the function and its inverse are smooth.- Definition :...
to the Cartesian
Cartesian coordinate system
A Cartesian coordinate system specifies each point uniquely in a plane by a pair of numerical coordinates, which are the signed distances from the point to two fixed perpendicular directed lines, measured in the same unit of length...
coordinate patch on the manifold. Note that two diffeomorphic coordinate patches on a differential manifold need not overlap differentiably. With this simple definition of a curvilinear coordinate system, all the results that follow below are simply applications of standard theorems in differential topology
Differential topology
In mathematics, differential topology is the field dealing with differentiable functions on differentiable manifolds. It is closely related to differential geometry and together they make up the geometric theory of differentiable manifolds.- Description :...
.
General curvilinear coordinates
- x = x(q1,q2,q3) direct transformation
- y = y(q1,q2,q3) (curvilinear to Cartesian coordinates)
- z = z(q1,q2,q3)
The above equation system can be solved for the arguments q1, q2, and q3 with solutions in the form:
- q1 = q1(x, y, z) inverse transformation
- q2 = q2(x, y, z) (Cartesian to curvilinear coordinates)
- q3 = q3(x, y, z)
The transformation functions are such that there's a one-to-one relationship between points in the "old" and "new" coordinates, that is, those functions are bijection
Bijection
A bijection is a function giving an exact pairing of the elements of two sets. A bijection from the set X to the set Y has an inverse function from Y to X. If X and Y are finite sets, then the existence of a bijection means they have the same number of elements...
s, and fulfil the following requirements within their domains:
- 1) They are smooth functionSmooth functionIn mathematical analysis, a differentiability class is a classification of functions according to the properties of their derivatives. Higher order differentiability classes correspond to the existence of more derivatives. Functions that have derivatives of all orders are called smooth.Most of...
s - 2) The inverse Jacobian determinant

is not zero; that is, the transformation is invertible according to the inverse function theoremInverse function theoremIn mathematics, specifically differential calculus, the inverse function theorem gives sufficient conditions for a function to be invertible in a neighborhood of a point in its domain...
. The condition that the Jacobian determinant is not zero reflects the fact that three surfaces from different families intersect in one and only one point and thus determine the position of this point in a unique way.
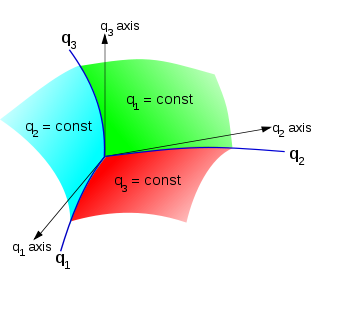
A given point may be described by specifying either x, y, z or q1, q2, q3 while each of the inverse equations describes a surface in the new coordinates and the intersection of three such surfaces locates the point in the three-dimensional space (Fig. 1). The surfaces q1 = const, q2 = const, q3 = const are called the coordinate surfaces; the space curves formed by their intersection in pairs are called the coordinate lines. The coordinate axes are determined by the tangents to the coordinate lines at the intersection of three surfaces. They are not in general fixed directions in space, as is true for simple Cartesian coordinates. The quantities (q1, q2, q3 ) are the curvilinear coordinates of a point P(q1, q2, q3 ).
In general, (q1, q2 ... qn ) are curvilinear coordinates in n-dimensional space.
Example: Spherical coordinates
Spherical coordinates are one of the most used curvilinear coordinate systems in such fields as Earth sciences, cartography, and physics (quantum physics, relativity, etc.). The curvilinear coordinates (q1, q2, q3) in this system are, respectively, r (radial distance or polar radius, r ≥ 0), θ (zenith or latitude, 0 ≤ θ ≤ 180°), and φ (azimuth or longitude, 0 ≤ φ ≤ 360°).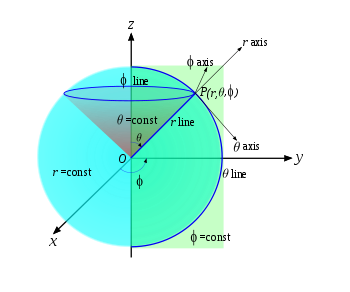
The direct relationship between Cartesian and spherical coordinates is given by:

Solving the above equation system for r, θ, and φ gives the inverse relations between spherical and Cartesian coordinates:

The respective spherical coordinate surfaces are derived in terms of Cartesian coordinates by fixing the spherical coordinates in the above inverse transformations to a constant value. Thus (Fig.2), r = const are concentric spherical surfaces centered at the origin, O, of the Cartesian coordinates, θ = const are circular conical surfaces with apex in O and axis the Oz axis, φ = const are half-planes bounded by the Oz axis and perpendicular to the xOy Cartesian coordinate plane. Each spherical coordinate line is formed at the pairwise intersection of the surfaces, corresponding to the other two coordinates: r lines (radial distance) are beams Or at the intersection of the cones θ = const and the half-planes φ = const; θ lines (meridians) are semicircles formed by the intersection of the spheres r = const and the half-planes φ = const ; and φ lines (parallels) are circles in planes parallel to xOy at the intersection of the spheres r = const and the cones θ = const. The location of a point P(r,θ,φ) is determined by the point of intersection of the three coordinate surfaces, or, alternatively, by the point of intersection of the three coordinate lines. The θ and φ axes in P(r,θ,φ) are the mutually perpendicular (orthogonal) tangents to the meridian and parallel of this point, while the r axis is directed along the radial distance and is orthogonal to both θ and φ axes.
The surfaces described by the inverse transformations are smooth functions within their defined domains. The Jacobian (functional determinant) of the inverse transformations is:
The concept of a basis
To define a vector in terms of coordinates, an additional coordinate-associated structure, called basisBasis (linear algebra)In linear algebra, a basis is a set of linearly independent vectors that, in a linear combination, can represent every vector in a given vector space or free module, or, more simply put, which define a "coordinate system"...
, is needed. A basis in three-dimensional space is a set of three linearly independentLinear independenceIn linear algebra, a family of vectors is linearly independent if none of them can be written as a linear combination of finitely many other vectors in the collection. A family of vectors which is not linearly independent is called linearly dependent...
vectorCoordinate vectorIn linear algebra, a coordinate vector is an explicit representation of a vector in an abstract vector space as an ordered list of numbers or, equivalently, as an element of the coordinate space Fn....
s , called basis vectors. Each basis vector is associated with a coordinate in the respective dimension. Any vector
, called basis vectors. Each basis vector is associated with a coordinate in the respective dimension. Any vector  can be represented as a sum of vectors
can be represented as a sum of vectors  formed by multiplication of a basis vector (
formed by multiplication of a basis vector ( ) by a scalar coefficient (
) by a scalar coefficient ( ), called component. Each vector, then, has exactly one component in each dimension and can be represented by the vector sum:
), called component. Each vector, then, has exactly one component in each dimension and can be represented by the vector sum:
A requirement for the coordinate system and its basis is that if at least one then
then
This condition is called linear independenceLinear independenceIn linear algebra, a family of vectors is linearly independent if none of them can be written as a linear combination of finitely many other vectors in the collection. A family of vectors which is not linearly independent is called linearly dependent...
. Linear independence implies that there cannot exist bases with basis vectors of zero magnitude because the latter will give zero-magnitude vectors when multiplied by any component. Non-coplanar vectors are linearly independent, and any triple of non-coplanar vectors can serve as a basis in three dimensions.
Basis vectors in curvilinear coordinates
For general curvilinear coordinates, basis vectors and components vary from point to point. Consider a -dimensional vector
-dimensional vector  that is expressed in a particular Cartesian coordinate systemCartesian coordinate systemA Cartesian coordinate system specifies each point uniquely in a plane by a pair of numerical coordinates, which are the signed distances from the point to two fixed perpendicular directed lines, measured in the same unit of length...
that is expressed in a particular Cartesian coordinate systemCartesian coordinate systemA Cartesian coordinate system specifies each point uniquely in a plane by a pair of numerical coordinates, which are the signed distances from the point to two fixed perpendicular directed lines, measured in the same unit of length...
as
If we change the basis vectors to , then the same vector
, then the same vector  may be expressed as
may be expressed as
where are the components of the vector in the new basis. Therefore, the vector sum that describes vector
are the components of the vector in the new basis. Therefore, the vector sum that describes vector  in the new basis is composed of different vectors, although the sum itself remains the same.
in the new basis is composed of different vectors, although the sum itself remains the same.
A coordinate basis whose basis vectors change their direction and/or magnitude from point to point is called local basis. All bases associated with curvilinear coordinates are necessarily local. Global bases, that is, bases composed of basis vectors that are the same in all points can be associated only with linear or affine coordinates. Therefore, for a curvilinear coordinate system with coordinates ( ), the vector
), the vector  can be expressed as
can be expressed as
Covariant and contravariant bases
Basis vectors are usually associated with a coordinate system by two methods:- they can be built along the coordinate axes (collinear with axes) or
- they can be built to be perpendicular (normal) to the coordinate surfaces.
In the first case (axis-collinear), basis vectors transform like covariant vectors while in the second case (normal to coordinate surfaces), basis vectors transform like contravariant vectors. Those two types of basis vectors are distinguished by the position of their indices: covariant vectors are designated with lower indices while contravariant vectors are designated with upper indices. Thus, depending on the method by which they are built, for a general curvilinear coordinate system there are two sets of basis vectors for every point: is the covariant basis, and
is the covariant basis, and  is the contravariant basis.
is the contravariant basis.
We can express a vector ( ) in terms either basis, i.e.,
) in terms either basis, i.e.,
A vector is covariant or contravariant if, respectively, its components are covariant or contravariant. From the above vector sums, it can be seen that contravariant vectors are represented with covariant basis vectors, and covariant vectors are represented with contravariant basis vectors.
A key convention in the representation of vectors and tensors in terms of indexed components and basis vectors is invariance in the sense that vector components which transform in a covariant manner (or contravariant manner) are paired with basis vectors that transform in a contravariant manner (or covariant manner).
Covariant basis
As stated above, contravariant vectors are vectors with contravariant components whose location is determined using covariant basis vectors that are built along the coordinate axes. In analogy to the other coordinate elements, transformation of the covariant basis of general curvilinear coordinates is described starting from the Cartesian coordinate systemCartesian coordinate systemA Cartesian coordinate system specifies each point uniquely in a plane by a pair of numerical coordinates, which are the signed distances from the point to two fixed perpendicular directed lines, measured in the same unit of length...
whose basis is called the standard basisStandard basisIn mathematics, the standard basis for a Euclidean space consists of one unit vector pointing in the direction of each axis of the Cartesian coordinate system...
. The standard basis in three-dimensional space is a global basis that is composed of 3 mutually orthogonal vectors each of unit length. Regardless of the method of building the basis (axis-collinear or normal to coordinate surfaces), in the Cartesian system the result is a single set of basis vectors, namely, the standard basis.
each of unit length. Regardless of the method of building the basis (axis-collinear or normal to coordinate surfaces), in the Cartesian system the result is a single set of basis vectors, namely, the standard basis.
Constructing a covariant basis in one dimension
Consider the one-dimensional curve shown in Fig. 3. At point P, taken as an origin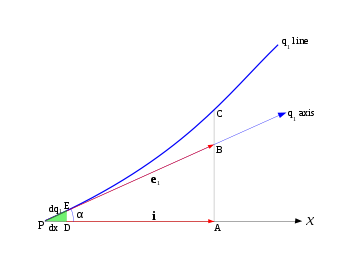 Origin (mathematics)In mathematics, the origin of a Euclidean space is a special point, usually denoted by the letter O, used as a fixed point of reference for the geometry of the surrounding space. In a Cartesian coordinate system, the origin is the point where the axes of the system intersect...
Origin (mathematics)In mathematics, the origin of a Euclidean space is a special point, usually denoted by the letter O, used as a fixed point of reference for the geometry of the surrounding space. In a Cartesian coordinate system, the origin is the point where the axes of the system intersect...
, x is one of the Cartesian coordinates, and is one of the curvilinear coordinates (Fig. 3). The local basis vector is
is one of the curvilinear coordinates (Fig. 3). The local basis vector is  and it is built on the
and it is built on the  axis which is a tangent to
axis which is a tangent to  coordinate line at the point P. The axis
coordinate line at the point P. The axis  and thus the vector
and thus the vector  form an angle α with the Cartesian x axis and the Cartesian basis vector
form an angle α with the Cartesian x axis and the Cartesian basis vector  .
.
It can be seen from triangle PAB that
where are the magnitudes of the two basis vectors, i.e., the scalar intercepts PB and PA. Note that PA is also the projection of
are the magnitudes of the two basis vectors, i.e., the scalar intercepts PB and PA. Note that PA is also the projection of  on the x axis.
on the x axis.
However, this method for basis vector transformations using directional cosines is inapplicable to curvilinear coordinates for the following reason: By increasing the distance from P, the angle between the curved line and Cartesian axis x increasingly deviates from α. At the distance PB the true angle is that which the tangent at point C forms with the x axis and the latter angle is clearly different from α. The angles that the
and Cartesian axis x increasingly deviates from α. At the distance PB the true angle is that which the tangent at point C forms with the x axis and the latter angle is clearly different from α. The angles that the  line and
line and  axis form with the x axis become closer in value the closer one moves towards point P and become exactly equal at P. Let point E be located very close to P, so close that the distance PE is infinitesimally small. Then PE measured on the
axis form with the x axis become closer in value the closer one moves towards point P and become exactly equal at P. Let point E be located very close to P, so close that the distance PE is infinitesimally small. Then PE measured on the  axis almost coincides with PE measured on the
axis almost coincides with PE measured on the  line. At the same time, the ratio
line. At the same time, the ratio  (PD being the projection of PE on the x axis) becomes almost exactly equal to cos α.
(PD being the projection of PE on the x axis) becomes almost exactly equal to cos α.
Let the infinitesimally small intercepts PD and PE be labelled, respectively, as dx and . Then
. Then and
and  .
.
Thus, the directional cosines can be substituted in transformations with the more exact ratios between infinitesimally small coordinate intercepts. From the foregoing discussion, it follows that the component (projection) of on the x axis is
on the x axis is
 .
.
If and
and  are smooth (continuously differentiable) functions the transformation ratios can be written as
are smooth (continuously differentiable) functions the transformation ratios can be written as and
and  ,
,
That is, those ratios are partial derivativePartial derivativeIn mathematics, a partial derivative of a function of several variables is its derivative with respect to one of those variables, with the others held constant...
s of coordinates belonging to one system with respect to coordinates belonging to the other system.
Constructing a covariant basis in three dimensions
Doing the same for the coordinates in the other 2 dimensions, can be expressed as:
can be expressed as:
Similar equations hold for and
and  so that the standard basis
so that the standard basis  is transformed to a local (ordered and normalised) basis
is transformed to a local (ordered and normalised) basis  by the following system of equations:
by the following system of equations:

Vectors in the above equation system are unit vectors (magnitude = 1) directed along the 3 axes of the curvilinear coordinate system. However, basis vectors in general curvilinear system are not required to be of unit length: they can be of arbitrary magnitude and direction.
in the above equation system are unit vectors (magnitude = 1) directed along the 3 axes of the curvilinear coordinate system. However, basis vectors in general curvilinear system are not required to be of unit length: they can be of arbitrary magnitude and direction.
By analogous reasoning, one can obtain the inverse transformation from local basis to standard basis:
The above systems of linear equations can be written in matrix form as and
and .
.
These are the equations that can be used to transform an Cartesian basis into a curvilinear basis, and vice versa.
The Jacobian of the transformation
The Jacobian matrices of the transformation are the matrices and
and  . In three dimensions, the expanded forms of these matrices are
. In three dimensions, the expanded forms of these matrices are
In the second equation system (the inverse transformation), the unknowns are the curvilinear basis vectors which are subject to the condition that in each point of the curvilinear coordinate system there must exist one and only one set of basis vectors. This condition is satisfied if and only if the equation system has a single solution. From linear algebraLinear algebraLinear algebra is a branch of mathematics that studies vector spaces, also called linear spaces, along with linear functions that input one vector and output another. Such functions are called linear maps and can be represented by matrices if a basis is given. Thus matrix theory is often...
, it is known that a linear equation system has a single solution only if the determinant of its system matrix is non-zero. For the second equation system, the determinant of the system matrix is
which shows the rationale behind the above requirement concerning the inverse Jacobian determinant.
Another, very important, feature of the above transformations is the nature of the derivatives: in front of the Cartesian basis vectors stand derivatives of Cartesian coordinates while in front of the curvilinear basis vectors stand derivatives of curvililear coordinates. In general, the following definition holds:
This definition is so general that it applies to covariance in the very abstract sense, and includes not only basis vectors, but also all vectors, components, tensors, pseudovectors, and pseudotensors (in the last two there is an additional sign flip). It also serves to define tensors in one of their most usual treatments.
Lamé coefficients
The partial derivative coefficients through which vector transformation is achieved are called also scale factors or Lamé coefficients (named after Gabriel LaméGabriel LaméGabriel Léon Jean Baptiste Lamé was a French mathematician.-Biography:Lamé was born in Tours, in today's département of Indre-et-Loire....
) .
.
However, this designation is very rarely used, being largely replaced with √gik, the components of the metric tensorMetric tensorIn the mathematical field of differential geometry, a metric tensor is a type of function defined on a manifold which takes as input a pair of tangent vectors v and w and produces a real number g in a way that generalizes many of the familiar properties of the dot product of vectors in Euclidean...
.
Vector and tensor algebra in three-dimensional curvilinear coordinates
Elementary vector and tensor algebra in curvilinear coordinates is used in some of the older scientific literature in mechanicsMechanicsMechanics is the branch of physics concerned with the behavior of physical bodies when subjected to forces or displacements, and the subsequent effects of the bodies on their environment....
and physicsPhysicsPhysics is a natural science that involves the study of matter and its motion through spacetime, along with related concepts such as energy and force. More broadly, it is the general analysis of nature, conducted in order to understand how the universe behaves.Physics is one of the oldest academic...
and can be indispensable to understanding work from the early and mid 1900s, for example the text by Green and Zerna. Some useful relations in the algebra of vectors and second-order tensors in curvilinear coordinates are given in this section. The notation and contents are primarily from Ogden,, Naghdi, Simmonds, Green and Zerna, Basar and Weichert, and Ciarlet.
Vectors in curvilinear coordinates
Let be an arbitrary basis for three-dimensional Euclidean space. In general, the basis vectors are neither unit vectors nor mutually orthogonal. However, they are required to be linearly independent. Then a vector
be an arbitrary basis for three-dimensional Euclidean space. In general, the basis vectors are neither unit vectors nor mutually orthogonal. However, they are required to be linearly independent. Then a vector  can be expressed as
can be expressed as
The components are the contravariant components of the vector
are the contravariant components of the vector  .
.
The reciprocal basis is defined by the relation
is defined by the relation 
where is the Kronecker delta.
is the Kronecker delta.
The vector can also be expressed in terms of the reciprocal basis:
can also be expressed in terms of the reciprocal basis:
The components are the covariant components of the vector
are the covariant components of the vector  .
.
Relations between components and basis vectors
From these definitions we can see that

Also,

Metric tensor
The quantities ,
,  are defined as
are defined as

From the above equations we have
Identity map
The identity map defined by
defined by  can be shown to be
can be shown to be
Scalar (Dot) product
The scalar product of two vectors in curvilinear coordinates is
Vector (Cross) product
The cross productCross productIn mathematics, the cross product, vector product, or Gibbs vector product is a binary operation on two vectors in three-dimensional space. It results in a vector which is perpendicular to both of the vectors being multiplied and normal to the plane containing them...
of two vectors is given by
where is the permutation symbol and
is the permutation symbol and  is a Cartesian basis vector. In curvilinear coordinates, the equivalent expression is
is a Cartesian basis vector. In curvilinear coordinates, the equivalent expression is
where is the third-order alternating tensor.
is the third-order alternating tensor.
Second-order tensors in curvilinear coordinates
A second-order tensor can be expressed as
The components are called the contravariant components,
are called the contravariant components,  the mixed right-covariant components,
the mixed right-covariant components,  the mixed left-covariant components, and
the mixed left-covariant components, and  the covariant components of the second-order tensor.
the covariant components of the second-order tensor.
Relations between components
The components of the second-order tensor are related by
Action of a second-order tensor on a vector
The action can be expressed in curvilinear coordinates as
can be expressed in curvilinear coordinates as
Inner product of two second-order tensors
The inner product of two second-order tensors can be expressed in curvilinear coordinates as
can be expressed in curvilinear coordinates as
Alternatively,
Determinant of a second-order tensor
If is a second-order tensor, then the determinant is defined by the relation
is a second-order tensor, then the determinant is defined by the relation
where are arbitrary vectors and
are arbitrary vectors and
Relations between curvilinear and Cartesian basis vectors
Let ( ) be the usual Cartesian basis vectors for the Euclidean space of interest and let
) be the usual Cartesian basis vectors for the Euclidean space of interest and let
where is a second-order transformation tensor that maps
is a second-order transformation tensor that maps  to
to  . Then,
. Then,
From this relation we can show that
Let be the Jacobian of the transformation. Then, from the definition of the determinant,
be the Jacobian of the transformation. Then, from the definition of the determinant,
Since
we have
A number of interesting results can be derived using the above relations.
First, consider
Then
Similarly, we can show that
Therefore, using the fact that ,
,
Another interesting relation is derived below. Recall that
where is a, yet undetermined, constant. Then
is a, yet undetermined, constant. Then
This observation leads to the relations
In index notation,
where is the usual permutation symbol.
is the usual permutation symbol.
We have not identified an explicit expression for the transformation tensor because an alternative form of the mapping between curvilinear and Cartesian bases is more useful. Assuming a sufficient degree of smoothness in the mapping (and a bit of abuse of notation), we have
because an alternative form of the mapping between curvilinear and Cartesian bases is more useful. Assuming a sufficient degree of smoothness in the mapping (and a bit of abuse of notation), we have
Similarly,
From these results we have
and
Vector products
The cross productCross productIn mathematics, the cross product, vector product, or Gibbs vector product is a binary operation on two vectors in three-dimensional space. It results in a vector which is perpendicular to both of the vectors being multiplied and normal to the plane containing them...
of two vectors is given by
where is the permutation symbol and
is the permutation symbol and  is a Cartesian basis vector. Therefore,
is a Cartesian basis vector. Therefore,
and
Hence,
Returning back to the vector product and using the relations
gives us
The alternating tensor
In an orthonormal right-handed basis, the third-order alternating tensorLevi-Civita symbolThe Levi-Civita symbol, also called the permutation symbol, antisymmetric symbol, or alternating symbol, is a mathematical symbol used in particular in tensor calculus...
is defined as
In a general curvilinear basis the same tensor may be expressed as
It can be shown that
Now,
Hence,
Similarly, we can show that
Vector and tensor calculus in three-dimensional curvilinear coordinates
Simmonds, in his book on tensor analysis, quotes Albert EinsteinAlbert EinsteinAlbert Einstein was a German-born theoretical physicist who developed the theory of general relativity, effecting a revolution in physics. For this achievement, Einstein is often regarded as the father of modern physics and one of the most prolific intellects in human history...
saying
The magic of this theory will hardly fail to impose itself on anybody who has truly understood it; it represents a genuine triumph of the method of absolute differential calculus, founded by Gauss, Riemann, Ricci, and Levi-Civita.
Vector and tensor calculus in general curvilinear coordinates is used in tensor analysis on four-dimensional curvilinear manifoldManifoldIn mathematics , a manifold is a topological space that on a small enough scale resembles the Euclidean space of a specific dimension, called the dimension of the manifold....
s in general relativityGeneral relativityGeneral relativity or the general theory of relativity is the geometric theory of gravitation published by Albert Einstein in 1916. It is the current description of gravitation in modern physics...
, in the mechanicsSolid mechanicsSolid mechanics is the branch of mechanics, physics, and mathematics that concerns the behavior of solid matter under external actions . It is part of a broader study known as continuum mechanics. One of the most common practical applications of solid mechanics is the Euler-Bernoulli beam equation...
of curved shells, in examining the invarianceInvarianceInvariance is a French magazine edited by Jacques Camatte, published since 1968.It emerged from the Italian left-communist tradition associated with Amadeo Bordiga and it originally bore the subtitle "Invariance of the theory of the proletariat", indicating Bordiga's notion of the unchanging nature...
properties of Maxwell's equationsMaxwell's equationsMaxwell's equations are a set of partial differential equations that, together with the Lorentz force law, form the foundation of classical electrodynamics, classical optics, and electric circuits. These fields in turn underlie modern electrical and communications technologies.Maxwell's equations...
which has been of interest in metamaterials and in many other fields.
Some useful relations in the calculus of vectors and second-order tensors in curvilinear coordinates are given in this section. The notation and contents are primarily from Ogden, Simmonds, Green and Zerna, Basar and Weichert, and Ciarlet.
Basic definitions
Let the position of a point in space be characterized by three coordinate variables .
.
The coordinate curve represents a curve on which
represents a curve on which  are constant. Let
are constant. Let  be the position vector of the point relative to some origin. Then, assuming that such a mapping and its inverse exist and are continuous, we can write
be the position vector of the point relative to some origin. Then, assuming that such a mapping and its inverse exist and are continuous, we can write 
The fields are called the curvilinear coordinate functions of the curvilinear coordinate system
are called the curvilinear coordinate functions of the curvilinear coordinate system  .
.
The coordinate curves are defined by the one-parameter family of functions given by
coordinate curves are defined by the one-parameter family of functions given by
with fixed.
fixed.
Tangent vector to coordinate curves
The tangent vector to the curve at the point
at the point  (or to the coordinate curve
(or to the coordinate curve  at the point
at the point  ) is
) is
Gradient of a scalar field
Let be a scalar field in space. Then
be a scalar field in space. Then
The gradient of the field is defined by
is defined by
where is an arbitrary constant vector. If we define the components
is an arbitrary constant vector. If we define the components  of vector
of vector  such that
such that
then
If we set , then since
, then since  , we have
, we have
which provides a means of extracting the contravariant component of a vector .
.
If is the covariant (or natural) basis at a point, and if
is the covariant (or natural) basis at a point, and if  is the contravariant (or reciprocal) basis at that point, then
is the contravariant (or reciprocal) basis at that point, then
A brief rationale for this choice of basis is given in the next section.
Gradient of a vector field
A similar process can be used to arrive at the gradient of a vector field . The gradient is given by
. The gradient is given by
If we consider the gradient of the position vector field , then we can show that
, then we can show that
The vector field is tangent to the
is tangent to the  coordinate curve and forms a natural basis at each point on the curve. This basis, as discussed at the beginning of this article, is also called the covariant curvilinear basis. We can also define a reciprocal basis, or contravariant curvilinear basis,
coordinate curve and forms a natural basis at each point on the curve. This basis, as discussed at the beginning of this article, is also called the covariant curvilinear basis. We can also define a reciprocal basis, or contravariant curvilinear basis,  . All the algebraic relations between the basis vectors, as discussed in the section on tensor algebra, apply for the natural basis and its reciprocal at each point
. All the algebraic relations between the basis vectors, as discussed in the section on tensor algebra, apply for the natural basis and its reciprocal at each point  .
.
Since is arbitrary, we can write
is arbitrary, we can write
Note that the contravariant basis vector is perpendicular to the surface of constant
is perpendicular to the surface of constant  and is given by
and is given by
Christoffel symbols of the first kind
The Christoffel symbolsChristoffel symbolsIn mathematics and physics, the Christoffel symbols, named for Elwin Bruno Christoffel , are numerical arrays of real numbers that describe, in coordinates, the effects of parallel transport in curved surfaces and, more generally, manifolds. As such, they are coordinate-space expressions for the...
of the first kind are defined as
To express in terms of
in terms of  we note that
we note that
Since we have
we have  . Using these to rearrange the above relations gives
. Using these to rearrange the above relations gives
Christoffel symbols of the second kind
The Christoffel symbols of the second kind are defined as
This implies that
Other relations that follow are
Another particularly useful relation, which shows that the Christoffel symbol depends only on the metric tensor and its derivatives, is
Explicit expression for the gradient of a vector field
The following expressions for the gradient of a vector field in curvilinear coordinates are quite useful.
Representing a physical vector field
The vector field can be represented as
can be represented as
where are the covariant components of the field,
are the covariant components of the field,  are the physical components, and
are the physical components, and
is the normalized contravariant basis vector.
Divergence of a vector field
The divergenceDivergenceIn vector calculus, divergence is a vector operator that measures the magnitude of a vector field's source or sink at a given point, in terms of a signed scalar. More technically, the divergence represents the volume density of the outward flux of a vector field from an infinitesimal volume around...
of a vector field ( )is defined as
)is defined as
In terms of components with respect to a curvilinear basis
Alternative expression for the divergence of a vector field
An alternative equation for the divergence of a vector field is frequently used. To derive this relation recall that
Now,
Noting that, due to the symmetry of ,
,
we have
Recall that if is the matrix whose components are
is the matrix whose components are  , then the inverse of the matrix is
, then the inverse of the matrix is  . The inverse of the matrix is given by
. The inverse of the matrix is given by
where are the cofactor matrices of the components
are the cofactor matrices of the components  . From matrix algebra we have
. From matrix algebra we have
Hence,
Plugging this relation into the expression for the divergence gives
A little manipulation leads to the more compact form
Laplacian of a scalar field
The Laplacian of a scalar field is defined as
is defined as
Using the alternative expression for the divergence of a vector field gives us
Now
Therefore,
Curl of a vector field
The curl of a vector field in covariant curvilinear coordinates can be written as
in covariant curvilinear coordinates can be written as
where
Gradient of a second-order tensor field
The gradient of a second order tensor field can similarly be expressed as
Explicit expressions for the gradient
If we consider the expression for the tensor in terms of a contravariant basis, then
We may also write
Representing a physical second-order tensor field
The physical components of a second-order tensor field can be obtained by using a normalized contravariant basis, i.e.,
where the hatted basis vectors have been normalized. This implies that
Divergence of a second-order tensor field
The divergenceDivergenceIn vector calculus, divergence is a vector operator that measures the magnitude of a vector field's source or sink at a given point, in terms of a signed scalar. More technically, the divergence represents the volume density of the outward flux of a vector field from an infinitesimal volume around...
of a second-order tensor field is defined using
where is an arbitrary constant vector.
is an arbitrary constant vector.
In curvilinear coordinates,
Orthogonal curvilinear coordinates
Assume, for the purposes of this section, that the curvilinear coordinate system is orthogonal, i.e.,-

or equivalently,-

where . As before,
. As before,  are covariant basis vectors and
are covariant basis vectors and  are contravariant basis vectors. Also, let (
are contravariant basis vectors. Also, let ( ) be a background, fixed, CartesianCartesian coordinate systemA Cartesian coordinate system specifies each point uniquely in a plane by a pair of numerical coordinates, which are the signed distances from the point to two fixed perpendicular directed lines, measured in the same unit of length...
) be a background, fixed, CartesianCartesian coordinate systemA Cartesian coordinate system specifies each point uniquely in a plane by a pair of numerical coordinates, which are the signed distances from the point to two fixed perpendicular directed lines, measured in the same unit of length...
basis. A list of orthogonal curvilinear coordinates is given below.
Metric tensor in orthogonal curvilinear coordinates
Let be the position vector of the point
be the position vector of the point  with respect to the origin of the coordinate system. The notation can be simplified by noting that
with respect to the origin of the coordinate system. The notation can be simplified by noting that  . At each point we can construct a small line element
. At each point we can construct a small line element  . The square of the length of the line element is the scalar product
. The square of the length of the line element is the scalar product  and is called the metricMetric (mathematics)In mathematics, a metric or distance function is a function which defines a distance between elements of a set. A set with a metric is called a metric space. A metric induces a topology on a set but not all topologies can be generated by a metric...
and is called the metricMetric (mathematics)In mathematics, a metric or distance function is a function which defines a distance between elements of a set. A set with a metric is called a metric space. A metric induces a topology on a set but not all topologies can be generated by a metric...
of the spaceSpaceSpace is the boundless, three-dimensional extent in which objects and events occur and have relative position and direction. Physical space is often conceived in three linear dimensions, although modern physicists usually consider it, with time, to be part of a boundless four-dimensional continuum...
. Recall that the space of interest is assumed to be EuclideanEuclidean spaceIn mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions...
when we talk of curvilinear coordinates. Let us express the position vector in terms of the background, fixed, Cartesian basis, i.e.,
Using the chain ruleChain ruleIn calculus, the chain rule is a formula for computing the derivative of the composition of two or more functions. That is, if f is a function and g is a function, then the chain rule expresses the derivative of the composite function in terms of the derivatives of f and g.In integration, the...
, we can then express in terms of three-dimensional orthogonal curvilinear coordinates
in terms of three-dimensional orthogonal curvilinear coordinates  as
as
Therefore the metric is given by
The symmetric quantity
is called the fundamental (or metric) tensorMetric tensorIn the mathematical field of differential geometry, a metric tensor is a type of function defined on a manifold which takes as input a pair of tangent vectors v and w and produces a real number g in a way that generalizes many of the familiar properties of the dot product of vectors in Euclidean...
of the Euclidean spaceEuclidean spaceIn mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions...
in curvilinear coordinates.
Note also that
where are the Lamé coefficients.
are the Lamé coefficients.
If we define the scale factors, , using
, using
we get a relation between the fundamental tensor and the Lamé coefficients.
Example: Polar coordinates
If we consider polar coordinates for R2, note that
(r, θ) are the curvilinear coordinates, and the Jacobian determinant of the transformation (r,θ) → (r cos θ, r sin θ) is r.
The orthogonal basis vectors are gr = (cos θ, sin θ), gθ = (−r sin θ, r cos θ). The normalized basis vectors are er = (cos θ, sin θ), eθ = (−sin θ, cos θ) and the scale factors are hr = 1 and hθ= r. The fundamental tensor is g11 =1, g22 =r2, g12 = g21 =0.
Line and surface integrals
If we wish to use curvilinear coordinates for vector calculus calculations, adjustments need to be made in the calculation of line, surface and volume integrals. For simplicity, we again restrict the discussion to three dimensions and orthogonal curvilinear coordinates. However, the same arguments apply for -dimensional problems though there are some additional terms in the expressions when the coordinate system is not orthogonal.
-dimensional problems though there are some additional terms in the expressions when the coordinate system is not orthogonal.
Line integrals
Normally in the calculation of line integralLine integralIn mathematics, a line integral is an integral where the function to be integrated is evaluated along a curve.The function to be integrated may be a scalar field or a vector field...
s we are interested in calculating
where x(t) parametrizes C in Cartesian coordinates.
In curvilinear coordinates, the term
by the chain ruleChain ruleIn calculus, the chain rule is a formula for computing the derivative of the composition of two or more functions. That is, if f is a function and g is a function, then the chain rule expresses the derivative of the composite function in terms of the derivatives of f and g.In integration, the...
. And from the definition of the Lamé coefficients,
and thus-

Now, since when
when  , we have
, we have
-

and we can proceed normally.
Surface integrals
Likewise, if we are interested in a surface integralSurface integralIn mathematics, a surface integral is a definite integral taken over a surface ; it can be thought of as the double integral analog of the line integral...
, the relevant calculation, with the parameterization of the surface in Cartesian coordinates is:
Again, in curvilinear coordinates, we have-

and we make use of the definition of curvilinear coordinates again to yield-

Therefore,-

where is the permutation symbol.
is the permutation symbol.
In determinant form, the cross product in terms of curvilinear coordinates will be:-

Grad, curl, div, Laplacian
In orthogonalOrthogonalityOrthogonality occurs when two things can vary independently, they are uncorrelated, or they are perpendicular.-Mathematics:In mathematics, two vectors are orthogonal if they are perpendicular, i.e., they form a right angle...
curvilinear coordinates of dimensions, where
dimensions, where
-

one can express the gradientGradientIn vector calculus, the gradient of a scalar field is a vector field that points in the direction of the greatest rate of increase of the scalar field, and whose magnitude is the greatest rate of change....
of a scalarScalar (mathematics)In linear algebra, real numbers are called scalars and relate to vectors in a vector space through the operation of scalar multiplication, in which a vector can be multiplied by a number to produce another vector....
or vector fieldVector fieldIn vector calculus, a vector field is an assignmentof a vector to each point in a subset of Euclidean space. A vector field in the plane for instance can be visualized as an arrow, with a given magnitude and direction, attached to each point in the plane...
as
For an orthogonal basis
The divergenceDivergenceIn vector calculus, divergence is a vector operator that measures the magnitude of a vector field's source or sink at a given point, in terms of a signed scalar. More technically, the divergence represents the volume density of the outward flux of a vector field from an infinitesimal volume around...
of a vector field can then be written as
Also,
Therefore,
We can get an expression for the Laplacian in a similar manner by noting that
Then we have
The expressions for the gradient, divergence, and Laplacian can be directly extended to -dimensions.
-dimensions.
The curl of a vector fieldVector fieldIn vector calculus, a vector field is an assignmentof a vector to each point in a subset of Euclidean space. A vector field in the plane for instance can be visualized as an arrow, with a given magnitude and direction, attached to each point in the plane...
is given by-

where is the product of all
is the product of all 
and is the Levi-Civita symbolLevi-Civita symbolThe Levi-Civita symbol, also called the permutation symbol, antisymmetric symbol, or alternating symbol, is a mathematical symbol used in particular in tensor calculus...
is the Levi-Civita symbolLevi-Civita symbolThe Levi-Civita symbol, also called the permutation symbol, antisymmetric symbol, or alternating symbol, is a mathematical symbol used in particular in tensor calculus...
.
Example: Cylindrical polar coordinates
For cylindrical coordinates we have
and
where
Then the covariant and contravariant basis vectors are
where are the unit vectors in the
are the unit vectors in the  directions.
directions.
Note that the components of the metric tensor are such that
which shows that the basis is orthogonal.
The non-zero components of the Christoffel symbol of the second kind are
Representing a physical vector field
The normalized contravariant basis vectors in cylindrical polar coordinates are
and the physical components of a vector are
are
Gradient of a scalar field
The gradient of a scalar field, , in cylindrical coordinates can now be computed from the general expression in curvilinear coordinates and has the form
, in cylindrical coordinates can now be computed from the general expression in curvilinear coordinates and has the form
Gradient of a vector field
Similarly, the gradient of a vector field, , in cylindrical coordinates can be shown to be
, in cylindrical coordinates can be shown to be
Divergence of a vector field
Using the equation for the divergence of a vector field in curvilinear coordinates, the divergence in cylindrical coordinates can be shown to be
Laplacian of a scalar field
The Laplacian is more easily computed by noting that . In cylindrical polar coordinates
. In cylindrical polar coordinates
Hence,
Representing a physical second-order tensor field
The physical components of a second-order tensor field are those obtained when the tensor is expressed in terms of a normalized contravariant basis. In cylindrical polar coordinates these components are
Gradient of a second-order tensor field
Using the above definitions we can show that the gradient of a second-order tensor field in cylindrical polar coordinates can be expressed as
Divergence of a second-order tensor field
The divergence of a second-order tensor field in cylindrical polar coordinates can be obtained from the expression for the gradient by collecting terms where the scalar product of the two outer vectors in the dyadic products is nonzero. Therefore,
Fictitious forces in general curvilinear coordinates
An inertial coordinate system is defined as a system of space and time coordinates x1, x2, x3, t in terms of which the equations of motion of a particle free of external forces are simply d2xj/dt2 = 0. In this context, a coordinate system can fail to be “inertial” either due to non-straight time axis or non-straight space axes (or both). In other words, the basis vectors of the coordinates may vary in time at fixed positions, or they may vary with position at fixed times, or both. When equations of motion are expressed in terms of any non-inertial coordinate system (in this sense), extra terms appear, called Christoffel symbols. Strictly speaking, these terms represent components of the absolute acceleration (in classical mechanics), but we may also choose to continue to regard d2xj/dt2 as the acceleration (as if the coordinates were inertial) and treat the extra terms as if they were forces, in which case they are called fictitious forces. The component of any such fictitious force normal to the path of the particle and in the plane of the path’s curvature is then called centrifugal forceCentrifugal forceCentrifugal force can generally be any force directed outward relative to some origin. More particularly, in classical mechanics, the centrifugal force is an outward force which arises when describing the motion of objects in a rotating reference frame...
.
This more general context makes clear the correspondence between the concepts of centrifugal force in rotating coordinate systemRotating reference frameA rotating frame of reference is a special case of a non-inertial reference frame that is rotating relative to an inertial reference frame. An everyday example of a rotating reference frame is the surface of the Earth. A rotating frame of reference is a special case of a non-inertial reference...
s and in stationary curvilinear coordinate systems. (Both of these concepts appear frequently in the literature.) For a simple example, consider a particle of mass m moving in a circle of radius r with angular speed w relative to a system of polar coordinates rotating with angular speed W. The radial equation of motion is mr” = Fr + mr(w+W)2. Thus the centrifugal force is mr times the square of the absolute rotational speed A = w + W of the particle. If we choose a coordinate system rotating at the speed of the particle, then W = A and w = 0, in which case the centrifugal force is mrA2, whereas if we choose a stationary coordinate system we have W = 0 and w = A, in which case the centrifugal force is again mrA2. The reason for this equality of results is that in both cases the basis vectors at the particle’s location are changing in time in exactly the same way. Hence these are really just two different ways of describing exactly the same thing, one description being in terms of rotating coordinates and the other being in terms of stationary curvilinear coordinates, both of which are non-inertial according to the more abstract meaning of that term.
When describing general motion, the actual forces acting on a particle are often referred to the instantaneous osculating circle tangent to the path of motion, and this circle in the general case is not centered at a fixed location, and so the decomposition into centrifugal and Coriolis components is constantly changing. This is true regardless of whether the motion is described in terms of stationary or rotating coordinates.
See also
- Covariance and contravarianceCovariance and contravarianceIn multilinear algebra and tensor analysis, covariance and contravariance describe how the quantitative description of certain geometric or physical entities changes with a change of basis from one coordinate system to another. When one coordinate system is just a rotation of the other, this...
- Basic introduction to the mathematics of curved spacetimeBasic introduction to the mathematics of curved spacetimeThe mathematics of general relativity are very complex. In Newton's theories of motions, an object's mass and length remain constant as it changes speed, and the rate of passage of time also remains unchanged. As a result, many problems in Newtonian mechanics can be solved with algebra alone...
- Orthogonal coordinatesOrthogonal coordinatesIn mathematics, orthogonal coordinates are defined as a set of d coordinates q = in which the coordinate surfaces all meet at right angles . A coordinate surface for a particular coordinate qk is the curve, surface, or hypersurface on which qk is a constant...
- Frenet-Serret formulasFrenet-Serret formulasIn vector calculus, the Frenet–Serret formulas describe the kinematic properties of a particle which moves along a continuous, differentiable curve in three-dimensional Euclidean space R3...
- Covariant derivativeCovariant derivativeIn mathematics, the covariant derivative is a way of specifying a derivative along tangent vectors of a manifold. Alternatively, the covariant derivative is a way of introducing and working with a connection on a manifold by means of a differential operator, to be contrasted with the approach given...
- Tensor derivative (continuum mechanics)Tensor derivative (continuum mechanics)The derivatives of scalars, vectors, and second-order tensors with respect to second-order tensors are of considerable use in continuum mechanics. These derivatives are used in the theories of nonlinear elasticity and plasticity, particularly in the design of algorithms for numerical...
- Curvilinear perspectiveCurvilinear perspectiveCurvilinear perspective is a graphical projection used to draw 3D objects on 2D surfaces. It was formally codified in 1968 by the artists and art historians André Barre and Albert Flocon in the book La Perspective curviligne, which was translated into English in 1987 as Curvilinear Perspective:...
- Del in cylindrical and spherical coordinatesDel in cylindrical and spherical coordinatesThis is a list of some vector calculus formulae of general use in working with various curvilinear coordinate systems.- Note :* This page uses standard physics notation. For spherical coordinates, \theta is the angle between the z axis and the radius vector connecting the origin to the point in...
External links
- Covariance and contravariance
-
-
-
-
-
-
-
-
-




