
Frenet-Serret formulas
Overview
Curve
In mathematics, a curve is, generally speaking, an object similar to a line but which is not required to be straight...
in three-dimensional Euclidean space
Euclidean space
In mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions...
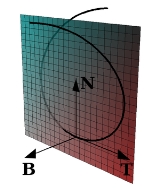
R3 (or the geometric properties of the curve irrespective of any motion). More specifically, the formulas describe the derivative
Derivative
In calculus, a branch of mathematics, the derivative is a measure of how a function changes as its input changes. Loosely speaking, a derivative can be thought of as how much one quantity is changing in response to changes in some other quantity; for example, the derivative of the position of a...
s of the so-called tangent, normal, and binormal unit vectors in terms of each other.
Unanswered Questions