

Variable frequency drive
Encyclopedia


Alternating current
In alternating current the movement of electric charge periodically reverses direction. In direct current , the flow of electric charge is only in one direction....
(AC) electric motor
Electric motor
An electric motor converts electrical energy into mechanical energy.Most electric motors operate through the interaction of magnetic fields and current-carrying conductors to generate force...
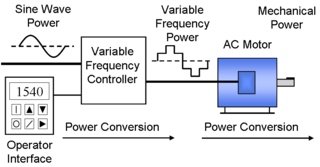
by controlling the frequency of the electrical power supplied to the motor. A variable frequency drive is a specific type of adjustable-speed drive. Variable-frequency drives are also known as adjustable-frequency drives (AFD), variable-speed drives (VSD), AC drives, microdrives or inverter drives. Since the voltage is varied along with frequency, these are sometimes also called VVVF (variable voltage variable frequency) drives.
Variable-frequency drives are widely used in ventilation systems for large buildings; variable-frequency motors on fans save energy by allowing the volume of air moved to match the system demand. They are also used on pumps, elevator
Elevator
An elevator is a type of vertical transport equipment that efficiently moves people or goods between floors of a building, vessel or other structures...
, conveyor and machine tool drives.
Energy savings
AC motor-driven applications that do not require full speed can save energy by controlling the motor with a variable speed drive. Energy cost saving with variable torque can be significant, often paying for the cost of VFD within a matter of months. In variable torque applications such as fans and blowers, the torque required varies roughly with the square of the speed, and the horsepower required varies roughly with the cube of the speed, resulting in a large reduction of horsepower for even a small reduction in speed. The motor will consume only 25% as much power at 63% speed than it will at 100% speed. This is referred to as the Affinity Laws, which define the relationships between speed, flow, torque, and horsepower.Starting torque control
Across-the-line single-speed starters start motors abruptly, subjecting the motor to a high starting torque and to current surges that are up to 8 times the full-load current. Variable speed drives instead gradually ramp the motor up to operating speed to lessen mechanical and electrical stress, reducing maintenance and repair costs, and extending the life of the motor and the driven equipment.Reduced-voltage starting methods also accelerate a motor gradually, but VF drives can be programmed to ramp up the motor much more gradually and smoothly, and can operate the motor at less than full speed to decrease wear and tear. Variable speed drives can also run a motor in specialized patterns to further minimize mechanical and electrical stress. For example, an S-curve pattern can be applied to a conveyor application for smoother decel/accel control, which reduces the backlash that can occur when a conveyor is accelerating or decelerating.
VFD types
All VFDs use their output devices (IGBTs, transistors, thyristorThyristor
A thyristor is a solid-state semiconductor device with four layers of alternating N and P-type material. They act as bistable switches, conducting when their gate receives a current trigger, and continue to conduct while they are forward biased .Some sources define silicon controlled rectifiers and...
s) only as switches, turning them only on or off. Using a linear device such as a transistor in its linear mode is impractical for a VFD drive, since the power dissipated in the drive devices would be about as much as the power delivered to the load.
Drives can be classified as:
- Constant voltage
- Constant current
- CycloconverterCycloconverterA cycloconverter or a cycloinverter converts an AC waveform, such as the mains supply, to another AC waveform of a lower frequency, synthesizing the output waveform from segments of the AC supply without an intermediate direct-current link . They are most commonly used in three-phase...
In a constant voltage converter, the intermediate DC link voltage remains approximately constant during each output cycle. In constant current drives, a large inductor is placed between the input rectifier and the output bridge, so the current delivered is nearly constant. A cycloconverter has no input rectifier or DC link and instead connects each output terminal to the appropriate input phase, making up the desired variable-freqeuncy output waveforms from pieces of the fixed-frequency input waveforms.
The most common type of packaged VF drive is the constant-voltage type, using pulse width modulation to control both the frequency and effective voltage applied to the motor load.
System description
Motor
The motor used in a VFD system is usually a three-phaseThree-phase
In electrical engineering, three-phase electric power systems have at least three conductors carrying voltage waveforms that are radians offset in time...
induction motor
Induction motor
An induction or asynchronous motor is a type of AC motor where power is supplied to the rotor by means of electromagnetic induction. These motors are widely used in industrial drives, particularly polyphase induction motors, because they are robust and have no brushes...
. Some types of single-phase motors can be used, but three-phase motors are usually preferred. Various types of synchronous motors offer advantages in some situations, but induction motors are suitable for most purposes and are generally the most economical choice. Motors that are designed for fixed-speed operation are often used. Certain enhancements to the standard motor designs offer higher reliability and better VFD performance, such as MG-31 rated motors.
Controller
Variable frequency drive controllers are solid stateSolid state (electronics)
Solid-state electronics are those circuits or devices built entirely from solid materials and in which the electrons, or other charge carriers, are confined entirely within the solid material...
electronic
Electronics
Electronics is the branch of science, engineering and technology that deals with electrical circuits involving active electrical components such as vacuum tubes, transistors, diodes and integrated circuits, and associated passive interconnection technologies...
power conversion devices. The usual design first converts AC input power to DC intermediate power using a rectifier
Rectifier
A rectifier is an electrical device that converts alternating current , which periodically reverses direction, to direct current , which flows in only one direction. The process is known as rectification...
or converter bridge. The rectifier is usually a three-phase, full-wave-diode bridge. The DC intermediate power is then converted to quasi-sinusoidal AC power using an inverter switching circuit. The inverter circuit is probably the most important section of the VFD, changing DC energy into three channels of AC energy that can be used by an AC motor. These units provide improved power factor, less harmonic distortion, and low sensitivity to the incoming phase sequencing than older phase controlled converter VFD's. Since incoming power is converted to DC, many units will accept single-phase as well as three-phase input power (acting as a phase converter
Phase converter
A phase converter is a device that converts electric power provided as single phase to multiple phase or vice-versa. The majority of phase converters are used to produce three phase electric power from a single-phase source, thus allowing the operation of three-phase equipment at a site that only...
as well as a speed controller); however the unit must be derated when using single phase input as only part of the rectifier bridge is carrying the connected load.
As new types of semiconductor
Semiconductor
A semiconductor is a material with electrical conductivity due to electron flow intermediate in magnitude between that of a conductor and an insulator. This means a conductivity roughly in the range of 103 to 10−8 siemens per centimeter...
switches have been introduced, these have promptly been applied to inverter circuits at all voltage and current ratings for which suitable devices are available. Introduced in the 1980s, the insulated-gate bipolar transistor (IGBT) became the device used in most VFD inverter circuits in the first decade of the 21st century.
AC motor characteristics require the applied voltage to be proportionally adjusted whenever the frequency is changed in order to deliver the rated torque. For example, if a motor is designed to operate at 460 volts at 60 Hz, the applied voltage must be reduced to 230 volts when the frequency is reduced to 30 Hz. Thus the ratio
Ratio
In mathematics, a ratio is a relationship between two numbers of the same kind , usually expressed as "a to b" or a:b, sometimes expressed arithmetically as a dimensionless quotient of the two which explicitly indicates how many times the first number contains the second In mathematics, a ratio is...
of volts per hertz must be regulated to a constant value (460/60 = 7.67 V/Hz in this case). For optimum performance, some further voltage adjustment may be necessary especially at low speeds, but constant volts per hertz is the general rule. This ratio can be changed in order to change the torque delivered by the motor.
In addition to this simple volts per hertz control more advanced control methods such as vector control
Vector control (motor)
Vector control is one method used in variable frequency drives to control the torque of three-phase AC electric motors by controlling the current fed to the machine.-Method:...
and direct torque control
Direct Torque Control
Direct torque control is one method used in variable frequency drives to control the torque of three-phase AC electric motors. This involves calculating an estimate of the motor's magnetic flux and torque based on the measured voltage and current of the motor.-Method:Stator flux linkage is...
(DTC) exist. These methods adjust the motor voltage in such a way that the magnetic flux and mechanical torque of the motor can be precisely controlled.
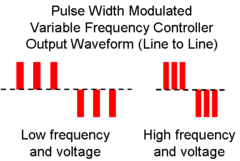
The usual method used to achieve variable motor voltage is pulse-width modulation
Pulse-width modulation
Pulse-width modulation , or pulse-duration modulation , is a commonly used technique for controlling power to inertial electrical devices, made practical by modern electronic power switches....
(PWM). With PWM voltage control, the inverter switches are used to construct a quasi-sinusoidal output waveform by a series of narrow voltage pulses with pseudosinusoidal varying pulse durations.
Operation of the motors above rated name plate speed (base speed) is possible, but is limited to conditions that do not require more power than the nameplate rating of the motor. This is sometimes called "field weakening" and, for AC motors, means operating at less than rated volts/hertz and above rated name plate speed. Permanent magnet synchronous motors have quite limited field weakening speed range due to the constant magnet flux linkage. Wound rotor synchronous motors and induction motors have much wider speed range. For example, a 100 hp, 460 V, 60 Hz, 1775 RPM (4 pole) induction motor supplied with 460 V, 75 Hz (6.134 V/Hz), would be limited to 60/75 = 80% torque at 125% speed (2218.75 RPM) = 100% power. At higher speeds the induction motor torque has to be limited further due to the lowering of the breakaway torque of the motor. Thus rated power can be typically produced only up to 130...150% of the rated name plate speed. Wound rotor synchronous motors can be run at even higher speeds. In rolling mill drives often 200...300% of the base speed is used. Naturally the mechanical strength of the rotor and the lifetime of the bearings also limit the maximum speed of the motor. Consulting the motor manufacturer is recommended if more than 150% speed is required by the application.
Embedded system
An embedded system is a computer system designed for specific control functions within a larger system. often with real-time computing constraints. It is embedded as part of a complete device often including hardware and mechanical parts. By contrast, a general-purpose computer, such as a personal...
microprocessor
Microprocessor
A microprocessor incorporates the functions of a computer's central processing unit on a single integrated circuit, or at most a few integrated circuits. It is a multipurpose, programmable device that accepts digital data as input, processes it according to instructions stored in its memory, and...
governs the overall operation of the VFD controller. The main microprocessor programming is in firmware
Firmware
In electronic systems and computing, firmware is a term often used to denote the fixed, usually rather small, programs and/or data structures that internally control various electronic devices...
that is inaccessible to the VFD user. However, some degree of configuration programming and parameter adjustment is usually provided so that the user can customize the VFD controller to suit specific motor and driven equipment requirements.
Operator interface
The operator interface provides a means for an operator to start and stop the motor and adjust the operating speed. Additional operator control functions might include reversing, and switching between manual speed adjustment and automatic control from an external process controlProcess control
Process control is a statistics and engineering discipline that deals with architectures, mechanisms and algorithms for maintaining the output of a specific process within a desired range...
signal. The operator interface often includes an alphanumeric
Alphanumeric
Alphanumeric is a combination of alphabetic and numeric characters, and is used to describe the collection of Latin letters and Arabic digits or a text constructed from this collection. There are either 36 or 62 alphanumeric characters. The alphanumeric character set consists of the numbers 0 to...
display and/or indication lights and meters to provide information about the operation of the drive. An operator interface keypad and display unit is often provided on the front of the VFD controller as shown in the photograph above. The keypad display can often be cable-connected and mounted a short distance from the VFD controller. Most are also provided with input and output
Input/output
In computing, input/output, or I/O, refers to the communication between an information processing system , and the outside world, possibly a human, or another information processing system. Inputs are the signals or data received by the system, and outputs are the signals or data sent from it...
(I/O) terminals for connecting pushbuttons, switches and other operator interface devices or control signals. A serial communications
Serial communications
In telecommunication and computer science, serial communication is the process of sending data one bit at a time, sequentially, over a communication channel or computer bus. This is in contrast to parallel communication, where several bits are sent as a whole, on a link with several parallel channels...
port
Computer port (hardware)
In computer hardware, a port serves as an interface between the computer and other computers or peripheral devices. Physically, a port is a specialized outlet on a piece of equipment to which a plug or cable connects...
is also often available to allow the VFD to be configured, adjusted, monitored and controlled using a computer.
Operation
When a VFD starts a motor, it initially applies a low frequency and voltage to the motor. The starting frequency is typically 2 Hz or less. Thus starting at such a low frequency avoids the high inrush current that occurs when a motor is started by simply applying the utility (mains) voltage by turning on a switch. After the start of the VFD, the applied frequency and voltage are increased at a controlled rate or ramped up to accelerateAcceleration
In physics, acceleration is the rate of change of velocity with time. In one dimension, acceleration is the rate at which something speeds up or slows down. However, since velocity is a vector, acceleration describes the rate of change of both the magnitude and the direction of velocity. ...
the load without drawing excessive current. This starting method typically allows a motor to develop 150% of its rated torque
Torque
Torque, moment or moment of force , is the tendency of a force to rotate an object about an axis, fulcrum, or pivot. Just as a force is a push or a pull, a torque can be thought of as a twist....
while the VFD is drawing less than 50% of its rated current from the mains in the low speed range. A VFD can be adjusted to produce a steady 150% starting torque from standstill right up to full speed. Note, however, that cooling of the motor is usually not good in the low speed range. Thus running at low speeds even with rated torque for long periods is not possible due to overheating of the motor. If continuous operation with high torque is required in low speeds an external fan is usually needed. The manufacturer of the motor and/or the VFD should specify the cooling requirements for this mode of operation.
In principle, the current on the motor side is in direct proportion to the torque that is generated and the voltage on the motor is in direct proportion of the actual speed, while on the network side, the voltage is constant, thus the current on line side is in direct proportion of the power drawn by the motor, that is U.I or C.N where C is torque and N the speed of the motor (we shall consider losses as well, neglected in this explanation).
- n stands for network (grid) and m for motor
- C stands for torque [Nm], U for voltage [V], I for current [A], and N for speed [rad/s]
We neglect losses for the moment:
- Un.In = Um.Im (same power drawn from network and from motor)
- Um.Im = Cm.Nm (motor mechanical power = motor electrical power)
- Given Un is a constant (network voltage) we conclude: In = Cm.Nm/Un That is "line current (network) is in direct proportion of motor power".
With a VFD, the stopping sequence is just the opposite as the starting sequence. The frequency and voltage applied to the motor are ramped down at a controlled rate. When the frequency approaches zero, the motor is shut off. A small amount of braking torque is available to help decelerate the load a little faster than it would stop if the motor were simply switched off and allowed to coast. Additional braking torque can be obtained by adding a braking circuit (resistor controlled by a transistor) to dissipate the braking energy. With 4-quadrants rectifiers (active-front-end), the VFD is able to brake the load by applying a reverse torque and reverting the energy to the network.
Power line harmonics
While PWM allows for nearly sinusoidal currents to be applied to a motor load, the diode rectifier of the VFD takes roughly square-wave current pulses out of the AC grid, creating harmonic distortion of the power line input, especially in the current waveform. When the VFD load size is small and the available utility power is large, the effects of VFD systems slicing small chunks out of the AC grid generally go unnoticed. Furthermore, in low voltage networks the harmonics caused by single phase equipment such as computers and TVs are such that they are partially cancelled by three-phase diode bridge harmonics.However, when either a large number of low-current VFDs, or just a few very large-load VFDs are used, they can have a cumulative negative impact on the AC power waveform available to other utility customers in the same grid.
When the utility voltage becomes misshapen and distorted, the losses in other loads such as normal AC motors are increased. This may in the worst case lead to overheating and shorter operating life. Also substation transformers and compensation capacitors are affected, the latter especially if resonances are aroused by the harmonics.
In order to limit the voltage distortion, the owner of the VFDs may be required to install filtering equipment to smooth out the irregular waveform. Alternatively, the utility may choose to install filtering equipment of its own at substations affected by the large amount of VFD equipment being used. In high power installations decrease of the harmonics can be obtained by supplying the VFDs from transformers that have different phase shift.
Furthermore, it is possible, instead of the diode rectifier, to use a transistor circuit similar to that which controls the motor. This kind of rectifier is called an active infeed converter in IEC standards. However, manufacturers call it by several names such as active rectifier
Active rectification
Active rectification, or synchronous rectification, is a technique for improving the efficiency of rectification by replacing diodes with actively-controlled switches such as transistors, usually power MOSFETs or power BJTs...
, ISU (IGBT Supply Unit), AFE (Active Front End) or four quadrant rectifier. With PWM control of the transistors and filter inductors in the supply lines, the AC current can be made nearly sinusoidal. Even better attenuation of the harmonics can be obtained by using an LCL (inductor-capacitor-inductor) filter instead of single three-phase filter inductor.
An additional advantage of the active infeed converter over the diode bridge is its ability to feed back the energy from the DC side to the AC grid. Thus no braking resistor is needed and the efficiency of the drive is improved if the drive is frequently required to brake the motor.
Transmission line effects
The output voltage of a PWM VFD consists of a train of pulses switched at what is called the carrier frequency. Because of the rapid rise time of these pulses, transmission line effects of the cable between the drive and motor must be considered. Since the transmission-line impedance of the cable and motor are different, pulses tend to reflect back from the motor terminals into the cable. The resulting voltages can produce up to twice the rated line voltage for long cable runs, putting high stress on the cable and motor winding and eventual insulation failure. Increasing the cable or motor size/type for long runs and using 480V or 600V motors instead of 230V will help offset the stresses imposed upon the equipment due to the VFD. (Modern 230v single phase motors are not affected). At 460 V, the maximum recommended cable distances between VFDs and motors can vary by a factor of 2.5:1. The longer cable distances are allowed at the lower Carrier Switching Frequencies (CSF) of 2.5 kHz. The lower CSF can produce audible noise at the motors. For applications requiring long motor cables VSD manufacturers usually offer dv/dt filters that decrease the steepness of the pulses. For very long cables or old motors with insufficient winding insulation, more efficient sinusoidal filters are recommended. Expect the older motor's life to shorten. Purchase VFD rated motors for the application.Motor bearings
Further, the rapid rise time of the pulses may cause trouble with the motor bearings. The stray capacitance of the windings provides paths for high frequency currents that pass through the motor shaft and bearings. If the voltage between the shaft and the shield of the motor exceeds a few volts the stored charge is discharged as a small spark. Repeated sparking causes erosion in the bearing surface that can be seen as a fluting pattern. In order to prevent sparking the motor cable should provide a low impedance return path from the motor frame back to the inverter. Thus it is essential to use a cable designed to be used with VSDs.In big motors a slip ring and brush can be used to provide a bypass path for the bearing currents. Alternatively, isolated bearings can be used.
The 2.5 kHz and 5 kHz CSFs cause fewer motor bearing problems than the 20 kHz CSFs. Shorter cables are recommended at the higher CSF of 20 kHz. (The minimum CSF for synchronize tracking of multiple conveyors is 8 kHz.)
The high frequency current ripple in the motor cables may also cause interference with other cabling in the building. This is another reason to use a motor cable designed for VSDs that has a symmetrical three-phase structure and good shielding. Furthermore, it is highly recommended to route the motor cables as far away from signal cables as possible.
Available power ratings
Variable frequency drives are available with voltage and current ratings to match the majority of 3-phase motors that are manufactured for operation from utility (mains) power. VFD controllers designed to operate at 110 V to 690 V are often classified as low voltage units. Low voltage units are typically designed for use with motors rated to deliver 0.2 kW or 0.25 horsepowerHorsepower
Horsepower is the name of several units of measurement of power. The most common definitions equal between 735.5 and 750 watts.Horsepower was originally defined to compare the output of steam engines with the power of draft horses in continuous operation. The unit was widely adopted to measure the...
(hp) up to several megawatts. For example, the largest ABB ACS800 single drives are rated for 5.6 MW. Medium voltage VFD controllers are designed to operate at 2,400/4,162 V (60 Hz), 3 kV (50 Hz) or up to 10 kV. In some applications a step up transformer
Transformer
A transformer is a device that transfers electrical energy from one circuit to another through inductively coupled conductors—the transformer's coils. A varying current in the first or primary winding creates a varying magnetic flux in the transformer's core and thus a varying magnetic field...
is placed between a low voltage drive and a medium voltage load. Medium voltage units are typically designed for use with motors rated to deliver 375 kW or 500 hp and above. Medium voltage drives rated above 7 kV and 5,000/10,000 hp should probably be considered to be one-of-a-kind (one-off) designs.
Medium voltage drives are generally rated amongst the following voltages : 2.3 kV, 3.3 kV, 4 kV, 6 kV, and 11 kV. The in-between voltages are generally possible as well. The power of M.V. drives is generally in the range of 0.3 to 100 MW; this involves a range of several different types of drives using different technologies.
Dynamic braking
Using the motor as a generator to absorb energy from the system is called dynamic braking. Dynamic braking stops the system more quickly than coasting. Since dynamic braking requires that the rotor be moving, it becomes less effective at low speed and cannot be used to hold a load at a stopped position.During normal braking of an electric motor, the electrical energy produced by the motor is dissipated as heat inside of the rotor, which increases the likelihood of damage and eventual failure. Therefore, some systems transfer this energy to an outside bank of resistors. Cooling fans may be used to protect the resistors from damage. Modern systems have thermal monitoring, so if the temperature of the bank becomes excessive, it will be switched off.
Regenerative variable-frequency drives
Regenerative AC drives have the capacity to recover the braking energy of a load moving faster than the designated motor speed (an overhauling load) and return it to the power system.Cycloconverters and current-source inverters inherently allow return of energy from the load to the line, while voltage-source inverters require an additional converter to return energy to the supply.
Regeneration is only useful in variable-frequency drives where the value of the recovered energy is large compared to the extra cost of a regenerative system, and if the system requires frequent braking and starting. An example would be conveyor belt drives for manufacturing, which stop every few minutes. While stopped, parts are assembled correctly; once that is done, the belt moves on. Another example is a crane, where the hoist motor stops and reverses frequently, and braking is required to slow the load during lowering. Regenerative variable-frequency drives are widely used where speed control of overhauling loads is required.
See also
- Direct torque controlDirect Torque ControlDirect torque control is one method used in variable frequency drives to control the torque of three-phase AC electric motors. This involves calculating an estimate of the motor's magnetic flux and torque based on the measured voltage and current of the motor.-Method:Stator flux linkage is...
- Frequency changerFrequency changerA frequency changer or frequency converter is an electronic device that converts alternating current of one frequency to alternating current of another frequency. The device may also change the voltage, but if it does, that is incidental to its principal purpose.Traditionally, these devices were...
- Space Vector ModulationSpace vector modulationSpace vector modulation is an algorithm for the control of pulse width modulation . It is used for the creation of alternating current waveforms; most commonly to drive 3 phase AC powered motors at varying speeds from DC using multiple class-D amplifiers. There are various variations of SVM that...
- Variable speed air compressorVariable speed air compressorA variable-speed drive air compressor is an air compressor that takes advantage of variable-speed drive technology. This type of compressor uses a special drive to control the speed of the unit, which in turn saves energy compared to a fixed speed equivalent.The most common form of VSD...
- Vector control (motor)Vector control (motor)Vector control is one method used in variable frequency drives to control the torque of three-phase AC electric motors by controlling the current fed to the machine.-Method:...
External links
- Links to drive system engineering guides for harmonics, emc, safety and fieldbus
- Link to the IET Control Techniques Drives and Controls Handbook
- What is a Variable Frequency Drive
- EC&M - Understanding Variable Speed Drives
- Links to AC Drives Manufacturers
- Benefits of Variable Frequency Drives
- Determining the Correct Drive for your Application
- VFD Harmonic Mitigation