
Control reconfiguration
Encyclopedia
Control reconfiguration is an active approach in control theory
to achieve fault-tolerant control for dynamic systems . It is used when severe faults
, such as actuator or sensor outages, cause a break-up of the control loop, which must be restructured to prevent failure
at the system level. In addition to loop restructuring, the controller
parameters must be adjusted to accommodate changed plant dynamics. Control reconfiguration is a building block toward increasing the dependability
of systems under feedback
control .
The nominal linear model of the plant is
The plant subject to a fault (indicated by a red arrow in the figure) is modelled in general by
where the subscript indicates that the system is faulty. This approach models multiplicative faults by modified system matrices. Specifically, actuator faults are represented by the new input matrix
indicates that the system is faulty. This approach models multiplicative faults by modified system matrices. Specifically, actuator faults are represented by the new input matrix  , sensor faults are represented by the output map
, sensor faults are represented by the output map  , and internal plant faults are represented by the system matrix
, and internal plant faults are represented by the system matrix  .
.
The upper part of the figure shows a supervisory loop consisting of fault detection and isolation (FDI) and reconfiguration which changes the loop by
To this end, the vectors of inputs and outputs contain all available signals, not just those used by the controller in fault-free operation.
Alternative scenarios model faults as an additive external signal influencing the state derivatives and outputs as follows:
influencing the state derivatives and outputs as follows:
Internal stability of the reconfigured closed loop is usually the minimum requirement. The equilibrium recovery goal (also referred to as weak goal) refers to the steady-state output equilibrium which the reconfigured loop reaches after a given constant input. This equilibrium must equal the nominal equilibrium under the same input (as time tends to infinity). This goal ensures steady-state reference tracking after reconfiguration. The output trajectory recovery goal (also referred to as strong goal) is even stricter. It requires that the dynamic response to an input must equal the nominal response at all times. Further restrictions are imposed by the state trajectory recovery goal, which requires that the state trajectory be restored to the nominal case by the reconfiguration under any input.
Usually a combination of goals is pursued in practice, such as the equilibrium recovery goal with stability.
The question whether or not these or similar goals can be reached for specific faults is addressed by reconfigurability
analysis.
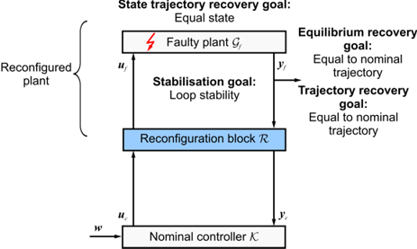 This paradigm aims at keeping the nominal controller in the loop. To this end, a reconfiguration block is placed between the faulty plant and the nominal controller. Together with the faulty plant, it forms the reconfigured plant. The reconfiguration block has to fulfill the requirement that the behaviour of the reconfigured plant matches the behaviour of the nominal, that is fault-free plant .
This paradigm aims at keeping the nominal controller in the loop. To this end, a reconfiguration block is placed between the faulty plant and the nominal controller. Together with the faulty plant, it forms the reconfigured plant. The reconfiguration block has to fulfill the requirement that the behaviour of the reconfigured plant matches the behaviour of the nominal, that is fault-free plant .
 of a state-feedback control structure is used. The new controller
of a state-feedback control structure is used. The new controller  is found to approximate
is found to approximate  in the sense of an induced matrix norm .
in the sense of an induced matrix norm .
In perfect model following, a dynamic compensator is introduced to allow for the exact recovery of the complete loop behaviour under certain conditions.
In eigenstructure assignment, the nominal closed loop eigenvalues and eigenvectors (the eigenstructure) is recovered to the nominal case after a fault.
Fault accommodation is another common approach to achieve fault tolerance. In contrast to control reconfiguration, accommodation is limited to internal controller changes. The sets of signals manipulated and measured by the controller are fixed, which means that the loop cannot be restructured .
Control theory
Control theory is an interdisciplinary branch of engineering and mathematics that deals with the behavior of dynamical systems. The desired output of a system is called the reference...
to achieve fault-tolerant control for dynamic systems . It is used when severe faults
Fault (technology)
In document ISO/CD 10303-226, a fault is defined as an abnormal condition or defect at the component, equipment, or sub-system level which may lead to a failure....
, such as actuator or sensor outages, cause a break-up of the control loop, which must be restructured to prevent failure
Failure
Failure refers to the state or condition of not meeting a desirable or intended objective, and may be viewed as the opposite of success. Product failure ranges from failure to sell the product to fracture of the product, in the worst cases leading to personal injury, the province of forensic...
at the system level. In addition to loop restructuring, the controller
Controller (control theory)
In control theory, a controller is a device which monitors and affects the operational conditions of a given dynamical system. The operational conditions are typically referred to as output variables of the system which can be affected by adjusting certain input variables...
parameters must be adjusted to accommodate changed plant dynamics. Control reconfiguration is a building block toward increasing the dependability
Dependability
Dependability is a value showing the reliability of a person to others because of his/her integrity, truthfulness, and trustfulness, traits that can encourage someone to depend on him/her.The wider use of this noun is in Systems engineering....
of systems under feedback
Feedback
Feedback describes the situation when output from an event or phenomenon in the past will influence an occurrence or occurrences of the same Feedback describes the situation when output from (or information about the result of) an event or phenomenon in the past will influence an occurrence or...
control .
Reconfiguration problem
Fault modelling
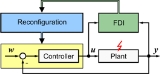
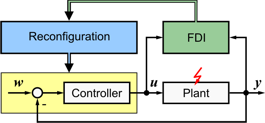
The figure to the right shows a plant controlled by a controller in a standard control loop.The nominal linear model of the plant is
The plant subject to a fault (indicated by a red arrow in the figure) is modelled in general by
where the subscript
indicates that the system is faulty. This approach models multiplicative faults by modified system matrices. Specifically, actuator faults are represented by the new input matrix , sensor faults are represented by the output map , and internal plant faults are represented by the system matrix .The upper part of the figure shows a supervisory loop consisting of fault detection and isolation (FDI) and reconfiguration which changes the loop by
- choosing new input and output signals from {
 } to reach the control goal,
} to reach the control goal, - changing the controller internals (including dynamic structure and parameters),
- adjusting the reference input
 .
.
To this end, the vectors of inputs and outputs contain all available signals, not just those used by the controller in fault-free operation.
Alternative scenarios model faults as an additive external signal
influencing the state derivatives and outputs as follows:Reconfiguration goals
The goal of reconfiguration is to keep the reconfigured control loop performance sufficient for preventing plant shutdown. The following goals are distinguished:- Stabilisation
- Equilibrium recovery
- Output trajectory recovery
- State trajectory recovery
Internal stability of the reconfigured closed loop is usually the minimum requirement. The equilibrium recovery goal (also referred to as weak goal) refers to the steady-state output equilibrium which the reconfigured loop reaches after a given constant input. This equilibrium must equal the nominal equilibrium under the same input (as time tends to infinity). This goal ensures steady-state reference tracking after reconfiguration. The output trajectory recovery goal (also referred to as strong goal) is even stricter. It requires that the dynamic response to an input must equal the nominal response at all times. Further restrictions are imposed by the state trajectory recovery goal, which requires that the state trajectory be restored to the nominal case by the reconfiguration under any input.
Usually a combination of goals is pursued in practice, such as the equilibrium recovery goal with stability.
The question whether or not these or similar goals can be reached for specific faults is addressed by reconfigurability
Reconfigurability
Reconfigurability denotes the Reconfigurable Computing capability of a system, so that its behavior can be changed by reconfiguration, i. e. by loading different configware code. This static reconfigurability distinguishes between reconfiguration time and run time...
analysis.
Fault hiding
Linear model following
In linear model following, a formal feature of the nominal closed loop is attempted to be recovered. In the classical pseudo-inverse method, the closed loop system matrix of a state-feedback control structure is used. The new controller is found to approximate in the sense of an induced matrix norm .In perfect model following, a dynamic compensator is introduced to allow for the exact recovery of the complete loop behaviour under certain conditions.
In eigenstructure assignment, the nominal closed loop eigenvalues and eigenvectors (the eigenstructure) is recovered to the nominal case after a fault.
Optimisation-based control schemes
Linear-quadratic regulator design (LQR), model predictive control (MPC)Mathematical tools and frameworks
The methods by which reconfiguration is achieved differ considerably. The following list gives an overview of mathematical approaches that are commonly used .- Adaptive controlAdaptive controlAdaptive control is the control method used by a controller which must adapt to a controlled system with parameters which vary, or are initially uncertain. For example, as an aircraft flies, its mass will slowly decrease as a result of fuel consumption; a control law is needed that adapts itself...
(AC) - Disturbance decoupling (DD)
- Eigenstructure assignment (EA)
- Gain schedulingGain schedulingIn control theory, gain scheduling is an approach to control of non-linear systems that uses a family of linear controllers, each of which provides satisfactory control for a different operating point of the system....
(GS)/linear parameter varying (LPV) - Generalised internal model control (GIMC)
- Intelligent control (IC)
- Linear matrix inequality (LMI)
- Linear-quadratic regulatorLinear-quadratic regulatorThe theory of optimal control is concerned with operating a dynamic system at minimum cost. The case where the system dynamics are described by a set of linear differential equations and the cost is described by a quadratic functional is called the LQ problem...
(LQR) - Model following (MF)
- Model predictive controlModel predictive controlModel Predictive Control, or MPC, is an advanced method of process control that has been in use in the process industries such as chemical plants and oil refineries since the 1980s...
(MPC) - Pseudo-inversePseudoinverseIn mathematics, and in particular linear algebra, a pseudoinverse of a matrix is a generalization of the inverse matrix. The most widely known type of matrix pseudoinverse is the Moore–Penrose pseudoinverse, which was independently described by E. H. Moore in 1920, Arne Bjerhammar in 1951 and...
method (PIM) - Robust controlRobust controlRobust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. Robust control methods are designed to function properly so long as uncertain parameters or disturbances are within some set...
techniques
See also
Prior to control reconfiguration, it must be at least determined whether a fault has occurred (fault detection) and if so, which components are affected (fault isolation). Preferably, a model of the faulty plant should be provided (fault identification). These questions are addressed by fault diagnosis methods.Fault accommodation is another common approach to achieve fault tolerance. In contrast to control reconfiguration, accommodation is limited to internal controller changes. The sets of signals manipulated and measured by the controller are fixed, which means that the loop cannot be restructured .