

Krasovskii-LaSalle principle
Encyclopedia
The Krasovskii–LaSalle principle is a criterion for the asymptotic stability
of a (possibly nonlinear) dynamical system
.
where is the vector of variables, with
is the vector of variables, with
If a function
function
 can be found such that
can be found such that
and
Let be the union of complete trajectories contained entirely in the set
be the union of complete trajectories contained entirely in the set  . Then the set of accumulation points of any trajectory is contained in
. Then the set of accumulation points of any trajectory is contained in  .
.
In particular, if contains no trajectory of the system except the trivial trajectory
contains no trajectory of the system except the trivial trajectory  for
for  , then the origin is globally asymptotically stable
, then the origin is globally asymptotically stable
.
hold only for in some neighborhood
in some neighborhood  of the origin, and the set
of the origin, and the set
does not contain any trajectories of the system besides the trajectory , then the local version of the Krasovskii–LaSalle principle states that the origin is locally asymptotically stable
, then the local version of the Krasovskii–LaSalle principle states that the origin is locally asymptotically stable
.
 is negative definite, the global asymptotic stability of the origin is a consequence of Lyapunov's second theorem
is negative definite, the global asymptotic stability of the origin is a consequence of Lyapunov's second theorem
. The Krasovskii–LaSalle principle gives a criterion for asymptotic stability in the case when is only negative semidefinite.
is only negative semidefinite.
 This section will apply the Krasovskii–LaSalle principle to establish the local asymptotic stability
This section will apply the Krasovskii–LaSalle principle to establish the local asymptotic stability
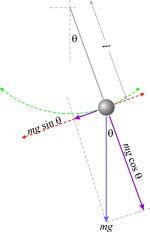
of a simple system, the pendulum with friction. This system can be modeled with the differential equation

where is the angle the pendulum makes with the vertical normal,
is the angle the pendulum makes with the vertical normal,  is the mass of the pendulum,
is the mass of the pendulum,  is the length of the pendulum,
is the length of the pendulum,  is the friction coefficient, and g
is the friction coefficient, and g
is acceleration due to gravity.
This, in turn, can be written as the system of equations


Using the Krasovskii–LaSalle principle, it can be shown that all trajectories which begin in a ball of certain size around the origin asymptotically converge to the origin. We define
asymptotically converge to the origin. We define  as
as

This is simply the scaled energy of the system Clearly,
is simply the scaled energy of the system Clearly,  is positive definite in an open ball of radius
is positive definite in an open ball of radius  around the origin. Computing the derivative,
around the origin. Computing the derivative,

Observe that . If it were true that
. If it were true that  , we could conclude that every trajectory approaches the origin by Lyapunov's second theorem
, we could conclude that every trajectory approaches the origin by Lyapunov's second theorem
. Unfortunately, and
and  is only negative semidefinite. However, the set
is only negative semidefinite. However, the set

which is simply the set

does not contain any trajectory of the system, except the trivial trajectory x = 0. Indeed, if at some time ,
,  , then because
, then because
 must be less
must be less  away from the origin,
away from the origin,  and
and  . As a result, the trajectory will not stay in the set
. As a result, the trajectory will not stay in the set  .
.
All the conditions of the local Krasovskii–LaSalle principle are satisfied, and we can conclude that every trajectory that begins in some neighborhood of the origin will converge to the origin as .
.
in a special case, and in 1959 by Krasovskii
in the general case .
Asymptotic stability
In control theory, a continuous linear time-invariant system is exponentially stable if and only if the system has eigenvalues with strictly negative real parts....
of a (possibly nonlinear) dynamical system
Dynamical system
A dynamical system is a concept in mathematics where a fixed rule describes the time dependence of a point in a geometrical space. Examples include the mathematical models that describe the swinging of a clock pendulum, the flow of water in a pipe, and the number of fish each springtime in a...
.
The global Krasovskii–LaSalle principle
Given a representation of the system
where
is the vector of variables, with
If a
functionFunction (mathematics)
In mathematics, a function associates one quantity, the argument of the function, also known as the input, with another quantity, the value of the function, also known as the output. A function assigns exactly one output to each input. The argument and the value may be real numbers, but they can...
can be found such that-
 , for all
, for all  (positive definite)
(positive definite) -
 for all
for all  (negative semidefinite)
(negative semidefinite) -
 , if
, if 
and

Let
be the union of complete trajectories contained entirely in the set . Then the set of accumulation points of any trajectory is contained in .In particular, if
contains no trajectory of the system except the trivial trajectory for , then the origin is globally asymptotically stableAsymptotic stability
In control theory, a continuous linear time-invariant system is exponentially stable if and only if the system has eigenvalues with strictly negative real parts....
.
Local version of the Krasovskii–LaSalle principle
If-
 , when
, when 
-

hold only for
in some neighborhood of the origin, and the set
does not contain any trajectories of the system besides the trajectory
, then the local version of the Krasovskii–LaSalle principle states that the origin is locally asymptotically stableAsymptotic stability
In control theory, a continuous linear time-invariant system is exponentially stable if and only if the system has eigenvalues with strictly negative real parts....
.
Relation to Lyapunov theory
If is negative definite, the global asymptotic stability of the origin is a consequence of Lyapunov's second theoremLyapunov stability
Various types of stability may be discussed for the solutions of differential equations describing dynamical systems. The most important type is that concerning the stability of solutions near to a point of equilibrium. This may be discussed by the theory of Lyapunov...
. The Krasovskii–LaSalle principle gives a criterion for asymptotic stability in the case when
is only negative semidefinite.Example: the pendulum with friction
Asymptotic stability
In control theory, a continuous linear time-invariant system is exponentially stable if and only if the system has eigenvalues with strictly negative real parts....
of a simple system, the pendulum with friction. This system can be modeled with the differential equation
where
is the angle the pendulum makes with the vertical normal, is the mass of the pendulum, is the length of the pendulum, is the friction coefficient, and gStandard gravity
Standard gravity, or standard acceleration due to free fall, usually denoted by g0 or gn, is the nominal acceleration of an object in a vacuum near the surface of the Earth. It is defined as precisely , or about...
is acceleration due to gravity.
This, in turn, can be written as the system of equations
Using the Krasovskii–LaSalle principle, it can be shown that all trajectories which begin in a ball of certain size around the origin
asymptotically converge to the origin. We define asThis
is simply the scaled energy of the system Clearly, is positive definite in an open ball of radius around the origin. Computing the derivative,Observe that
. If it were true that , we could conclude that every trajectory approaches the origin by Lyapunov's second theoremLyapunov stability
Various types of stability may be discussed for the solutions of differential equations describing dynamical systems. The most important type is that concerning the stability of solutions near to a point of equilibrium. This may be discussed by the theory of Lyapunov...
. Unfortunately,
and is only negative semidefinite. However, the setwhich is simply the set
does not contain any trajectory of the system, except the trivial trajectory x = 0. Indeed, if at some time
, , then because must be less away from the origin, and . As a result, the trajectory will not stay in the set .All the conditions of the local Krasovskii–LaSalle principle are satisfied, and we can conclude that every trajectory that begins in some neighborhood of the origin will converge to the origin as
.History
While LaSalle was the first author in the West to publish this theorem in 1960, its first publication was in 1952 by Barbashin and KrasovskiiNikolai Nikolaevich Krasovsky
Nikolay Nikolayevich Krasovsky is a prominent Russian mathematician who works in the mathematical theory of control, the theory of dynamical systems, and the theory of differential games...
in a special case, and in 1959 by Krasovskii
Nikolai Nikolaevich Krasovsky
Nikolay Nikolayevich Krasovsky is a prominent Russian mathematician who works in the mathematical theory of control, the theory of dynamical systems, and the theory of differential games...
in the general case .
Original papers
- Krasovskii, N. N. Problems of the Theory of Stability of Motion, (Russian), 1959. English translation: Stanford University Press, Stanford, CA, 1963.
- LaSalle, J.P. Some extensions of Liapunov's second method, IRE Transactions on Circuit Theory, CT-7, pp. 520–527, 1960.