
Hierarchical control system
Encyclopedia
A Hierarchical control system is a form of Control System
in which a set of devices and governing software is arranged in a hierarchical tree
. When the links in the tree are implemented by a computer network
, then that hierarchical control system is also a form of Networked control system
.

has among its notable features the organizational chart
of superiors, subordinates, and lines of organizational communication
. Hierarchical control systems are organized similarly to divide the decision making responsibility.
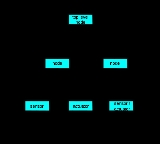
Each element of the hierarchy is a linked node
in the tree. Commands, tasks and goals to be achieved flow down the tree from superior nodes to subordinate nodes, whereas sensations and command results flow up the tree from subordinate to superior nodes. Nodes may also exchange messages with their siblings. The two distinguishing features of a hierarchical control system are related to its layers.
Besides artificial systems, an animal's control systems are proposed to be organized as a hierarchy. In perceptual control theory
, which postulates that an organism's behavior is a means of controlling its perceptions, the organism's control systems are suggested to be organized in a hierarchical pattern as their perceptions are constructed so.
is the hierarchical paradigm in which a robot operates in a top-down fashion, heavy on planning, especially motion planning
. Computer-aided production engineering
has been a research focus at NIST since the 1980s. Its Automated Manufacturing Research Facility was used to develop a five layer production control model. In the early 1990s DARPA sponsored research to develop distributed (i.e. networked) intelligent control systems
for applications such as military command and control systems. NIST built on earlier research to develop its Real-Time Control System
(RCS) and Real-time Control System Software which is a generic hierarchical control system that has been used to operate a manufacturing cell
, a robot crane
, and an automated vehicle
.
In November 2007, DARPA held the Urban Challenge
. The winning entry, Tartan Racing employed a hierarchical control system, with layered mission planning
, motion planning
, behavior generation, perception, world modelling, and mechatronics
.
is a methodology for developing artificial intelligence
that is heavily associated with behavior based robotics. This architecture is a way of decomposing complicated intelligent behavior into many "simple" behavior modules, which are in turn organized into layers. Each layer implements a particular goal of the software agent
(i.e. system as a whole), and higher layers are increasingly more abstract. Each layer's goal subsumes that of the underlying layers, e.g. the decision to move forward by the eat-food layer takes into account the decision of the lowest obstacle-avoidance layer. Behavior need not be planned by a superior layer, rather behaviors may be triggered by sensory inputs and so are only active under circumstances where they might be appropriate.
Reinforcement learning
has been used to acquire behavior in a hierarchical control system in which each node can learn to improve its behavior with experience.
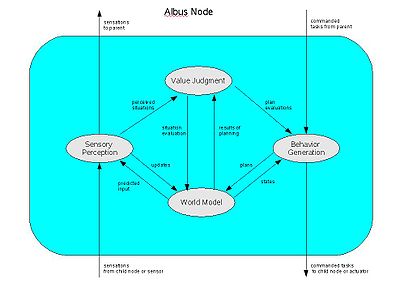 James Albus, while at NIST, developed a theory for intelligent system design named the Reference Model Architecture (RMA), which is a hierarchical control system inspired by RCS. Albus defines each node to contain these components.
James Albus, while at NIST, developed a theory for intelligent system design named the Reference Model Architecture (RMA), which is a hierarchical control system inspired by RCS. Albus defines each node to contain these components.
At its lowest levels, the RMA can be implemented as a subsumption architecture, in which the world model is mapped directly to the controlled process or real world, avoiding the need for a mathematical abstraction, and in which time-constrained reactive planning
can be implemented as a finite state machine
. Higher levels of the RMA however, may have sophisticated mathematical world models and behavior implemented by automated planning and scheduling
. Planning is required when certain behaviors cannot be triggered by current sensations, but rather by predicted or anticipated sensations, especially those that come about as result of the node's actions.
Control system
A control system is a device, or set of devices to manage, command, direct or regulate the behavior of other devices or system.There are two common classes of control systems, with many variations and combinations: logic or sequential controls, and feedback or linear controls...
in which a set of devices and governing software is arranged in a hierarchical tree
Tree (data structure)
In computer science, a tree is a widely-used data structure that emulates a hierarchical tree structure with a set of linked nodes.Mathematically, it is an ordered directed tree, more specifically an arborescence: an acyclic connected graph where each node has zero or more children nodes and at...
. When the links in the tree are implemented by a computer network
Computer network
A computer network, often simply referred to as a network, is a collection of hardware components and computers interconnected by communication channels that allow sharing of resources and information....
, then that hierarchical control system is also a form of Networked control system
Networked control system
A Networked Control System is a control system wherein the control loops are closed through a real-time network. The defining feature of an NCS is that control and feedback signals are exchanged among the system's components in the form of information packages through a network.- Overview :The...
.
Overview
A human-built system with complex behavior is often organized as a hierarchy. For example a command hierarchyCommand hierarchy
A command hierarchy is a group of people committed to carrying out orders "from the top", that is, of authority. It is part of a power structure: usually seen as the most vulnerable and also the most powerful part of it.-Sociology:...
has among its notable features the organizational chart
Organizational chart
An organizational chart is a diagram that shows the structure of an organization and the relationships and relative ranks of its parts and positions/jobs...
of superiors, subordinates, and lines of organizational communication
Organizational communication
Organizational communication is a subfield of the larger discipline of communication studies. Organizational communication, as a field, is the consideration, analysis, and criticism of the role of communication in organizational contexts....
. Hierarchical control systems are organized similarly to divide the decision making responsibility.
Each element of the hierarchy is a linked node
Node (networking)
In communication networks, a node is a connection point, either a redistribution point or a communication endpoint . The definition of a node depends on the network and protocol layer referred to...
in the tree. Commands, tasks and goals to be achieved flow down the tree from superior nodes to subordinate nodes, whereas sensations and command results flow up the tree from subordinate to superior nodes. Nodes may also exchange messages with their siblings. The two distinguishing features of a hierarchical control system are related to its layers.
- Each higher layer of the tree operates with a longer interval of planning and execution time than its immediately lower layer.
- The lower layers have local tasks, goals, and sensations, and their activities are planned and coordinated by higher layers which do not generally override their decisions. The layers form a hybrid intelligent systemHybrid intelligent systemHybrid intelligent system denotes a software system which employs, in parallel, a combination of methods and techniques from artificial intelligence subfields as:* Neuro-fuzzy systems* hybrid connectionist-symbolic models* Fuzzy expert systems...
in which the lowest, reactive layers are sub-symbolic. The higher layers, having relaxed time constraints, are capable of reasoning from an abstract world model and performing planning. A hierarchical task networkHierarchical task networkIn artificial intelligence, the hierarchical task network, or HTN, is an approach to automated planning in which the dependency among actions can be given in the form of networks....
is a good fit for planning in a hierarchical control system.
Besides artificial systems, an animal's control systems are proposed to be organized as a hierarchy. In perceptual control theory
Perceptual control theory
Perceptual control theory is a model of the psychological and behavioral processes occurring within living beings, including humans. It demonstrates that animals are goal-driven, purposeful entities rather than automata repeating conditioned responses to external stimuli or computers planning...
, which postulates that an organism's behavior is a means of controlling its perceptions, the organism's control systems are suggested to be organized in a hierarchical pattern as their perceptions are constructed so.
Manufacturing, robotics and vehicles
Among the robotic paradigmsRobotic paradigms
A robotic paradigm can be described by the relationship between the three primitives of robotics: Sense, Plan, and Act. It can also be described by how sensory data is processed and distributed through the system, and where decisions are made....
is the hierarchical paradigm in which a robot operates in a top-down fashion, heavy on planning, especially motion planning
Motion planning
Motion planning is a term used in robotics for the process of detailing a task into discrete motions....
. Computer-aided production engineering
Computer-aided production engineering
__FORCETOC__Computer-aided production engineering is a relatively new and significant branch of engineering. Global manufacturing has changed the environment in which goods are produced...
has been a research focus at NIST since the 1980s. Its Automated Manufacturing Research Facility was used to develop a five layer production control model. In the early 1990s DARPA sponsored research to develop distributed (i.e. networked) intelligent control systems
Networked control system
A Networked Control System is a control system wherein the control loops are closed through a real-time network. The defining feature of an NCS is that control and feedback signals are exchanged among the system's components in the form of information packages through a network.- Overview :The...
for applications such as military command and control systems. NIST built on earlier research to develop its Real-Time Control System
Real-Time Control System
The Real-time Control System is a software system developed by NIST based on the Real-time Control System Reference Model Architecture, that implements a generic Hierarchical control system...
(RCS) and Real-time Control System Software which is a generic hierarchical control system that has been used to operate a manufacturing cell
Cellular manufacturing
Cellular Manufacturing is a model for workplace design, and has become an integral part of lean manufacturing systems. Cellular Manufacturing is based upon the principals of Group Technology, which seeks to take full advantage of the similarity between parts, through standardisation and common...
, a robot crane
Crane (machine)
A crane is a type of machine, generally equipped with a hoist, wire ropes or chains, and sheaves, that can be used both to lift and lower materials and to move them horizontally. It uses one or more simple machines to create mechanical advantage and thus move loads beyond the normal capability of...
, and an automated vehicle
Driverless car
An autonomous car, also known as robotic or informally as driverless, is an autonomous vehicle capable of fulfilling the human transportation capabilities of a traditional car. As an autonomous vehicle, it is capable of sensing its environment and navigating on its own...
.
In November 2007, DARPA held the Urban Challenge
DARPA Grand Challenge
The DARPA Grand Challenge is a prize competition for driverless vehicles, funded by the Defense Advanced Research Projects Agency, the most prominent research organization of the United States Department of Defense...
. The winning entry, Tartan Racing employed a hierarchical control system, with layered mission planning
Automated planning and scheduling
Automated planning and scheduling is a branch of artificial intelligence that concerns the realization of strategies or action sequences, typically for execution by intelligent agents, autonomous robots and unmanned vehicles. Unlike classical control and classification problems, the solutions are...
, motion planning
Motion planning
Motion planning is a term used in robotics for the process of detailing a task into discrete motions....
, behavior generation, perception, world modelling, and mechatronics
Mechatronics
Mechatronics is the combination of mechanical engineering, electronic engineering, computer engineering, software engineering, control engineering, and systems design engineering in order to design, and manufacture useful products. Mechatronics is a multidisciplinary field of engineering, that is...
.
Artificial intelligence
Subsumption architectureSubsumption architecture
Subsumption architecture is a reactive robot architecture heavily associated with behavior-based robotics. The term was introduced by Rodney Brooks and colleagues in 1986...
is a methodology for developing artificial intelligence
Artificial intelligence
Artificial intelligence is the intelligence of machines and the branch of computer science that aims to create it. AI textbooks define the field as "the study and design of intelligent agents" where an intelligent agent is a system that perceives its environment and takes actions that maximize its...
that is heavily associated with behavior based robotics. This architecture is a way of decomposing complicated intelligent behavior into many "simple" behavior modules, which are in turn organized into layers. Each layer implements a particular goal of the software agent
Software agent
In computer science, a software agent is a piece of software that acts for a user or other program in a relationship of agency, which derives from the Latin agere : an agreement to act on one's behalf...
(i.e. system as a whole), and higher layers are increasingly more abstract. Each layer's goal subsumes that of the underlying layers, e.g. the decision to move forward by the eat-food layer takes into account the decision of the lowest obstacle-avoidance layer. Behavior need not be planned by a superior layer, rather behaviors may be triggered by sensory inputs and so are only active under circumstances where they might be appropriate.
Reinforcement learning
Reinforcement learning
Inspired by behaviorist psychology, reinforcement learning is an area of machine learning in computer science, concerned with how an agent ought to take actions in an environment so as to maximize some notion of cumulative reward...
has been used to acquire behavior in a hierarchical control system in which each node can learn to improve its behavior with experience.
- Behavior generation is responsible for executing tasks received from the superior, parent node. It also plans for, and issues tasks to, the subordinate nodes.
- Sensory perception is responsible for receiving sensations from the subordinate nodes, then grouping, filtering, and otherwise processing them into higher level abstractions that update the local state and which form sensations that are sent to the superior node.
- Value judgment is responsible for evaluating the updated situation and evaluating alternative plans.
- World Model is the local state that provides a model for the controlled system, controlled process, or environment at the abstraction level of the subordinate nodes.
At its lowest levels, the RMA can be implemented as a subsumption architecture, in which the world model is mapped directly to the controlled process or real world, avoiding the need for a mathematical abstraction, and in which time-constrained reactive planning
Reactive planning
In artificial intelligence, reactive planning denotes a group of techniques for action selection by autonomous agents. These techniques differ from classical planning in two aspects. First, they operate in a timely fashion and hence can cope with highly dynamic and unpredictable environments....
can be implemented as a finite state machine
Finite state machine
A finite-state machine or finite-state automaton , or simply a state machine, is a mathematical model used to design computer programs and digital logic circuits. It is conceived as an abstract machine that can be in one of a finite number of states...
. Higher levels of the RMA however, may have sophisticated mathematical world models and behavior implemented by automated planning and scheduling
Automated planning and scheduling
Automated planning and scheduling is a branch of artificial intelligence that concerns the realization of strategies or action sequences, typically for execution by intelligent agents, autonomous robots and unmanned vehicles. Unlike classical control and classification problems, the solutions are...
. Planning is required when certain behaviors cannot be triggered by current sensations, but rather by predicted or anticipated sensations, especially those that come about as result of the node's actions.
External links
- The RCS (Realtime Control System) Library
- Texai An open source project to create artificial intelligence using an Albus hierarchical control system