
Freddy II
Encyclopedia

University of Edinburgh School of Informatics
The School of Informatics is an academic unit of the University of Edinburgh, in Scotland, responsible for research, teaching, outreach and commercialisation in Informatics....
at the University of Edinburgh).
Technology
Technical innovations involving Freddy were at the forefront of the 70s robotics field. Freddy was one of the earliest robots to integrate vision, manipulation and intelligent systems as well as having versatility in the system and ease in retraining and reprogramming for new tasks. The idea of moving the table instead of the arm simplified the construction. Freddy also used a method of recognising the parts visually by using graph matching on the detected features. The system used an innovative collection of high level procedures for programming the arm movements which could be reused for each new task.Lighthill controversy
In the mid 1970s there was controversy about the utility of pursuing a general purpose robotics programme in both the USA and the UK. A BBC TV programme in 1973, referred to as the "Lighthill Debate" (on-line versions available here), pitched James LighthillJames Lighthill
Sir Michael James Lighthill, FRS was a British applied mathematician, known for his pioneering work in the field of aeroacoustics.-Biography:...
, who had written a critical report for the science and engineering research funding agencies in the UK, against Donald Michie
Donald Michie
Donald Michie was a British researcher in artificial intelligence. During World War II, Michie worked for the Government Code and Cypher School at Bletchley Park, contributing to the effort to solve "Tunny," a German teleprinter cipher.-Early life and career:Michie was born in Rangoon, Burma...
from the University of Edinburgh
University of Edinburgh
The University of Edinburgh, founded in 1583, is a public research university located in Edinburgh, the capital of Scotland, and a UNESCO World Heritage Site. The university is deeply embedded in the fabric of the city, with many of the buildings in the historic Old Town belonging to the university...
and John McCarthy
John McCarthy (computer scientist)
John McCarthy was an American computer scientist and cognitive scientist. He coined the term "artificial intelligence" , invented the Lisp programming language and was highly influential in the early development of AI.McCarthy also influenced other areas of computing such as time sharing systems...
from Stanford University
Stanford University
The Leland Stanford Junior University, commonly referred to as Stanford University or Stanford, is a private research university on an campus located near Palo Alto, California. It is situated in the northwestern Santa Clara Valley on the San Francisco Peninsula, approximately northwest of San...
. The Edinburgh Freddy II and Stanford/SRI Shakey
Shakey the Robot
Shakey the Robot was the first general-purpose mobile robot to be able to reason about its own actions. While other robots would have to be instructed on each individual step of completing a larger task, Shakey could analyze the command and break it down into basic chunks by itself...
robots were used to illustrate the state-of-the-art at the time in intelligent robotics systems.
Freddy I and II

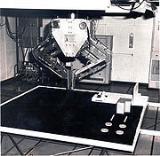
Freddy II (1973–1976) was a 5 degrees of freedom manipulator with a large vertical 'hand' that could move up and down, rotate about the vertical axis and rotate objects held in its gripper around one horizontal axis. Two remaining translational degrees of freedom were generated by a work surface that moved beneath the gripper. The gripper was a two finger pinch gripper. A video camera was added as well as a later a light stripe generator.
The Freddy and Freddy II projects were initiated and overseen by Donald Michie
Donald Michie
Donald Michie was a British researcher in artificial intelligence. During World War II, Michie worked for the Government Code and Cypher School at Bletchley Park, contributing to the effort to solve "Tunny," a German teleprinter cipher.-Early life and career:Michie was born in Rangoon, Burma...
. The mechanical hardware and analogue electronics were designed and built by Stephen Salter (who also pioneered renewable energy from waves (see Salter Duck)), and the digital electronics and computer interfacing were designed by Harry Barrow and Gregan Crawford. The software was developed by a team led by Rod Burstall, Robin Popplestone
Robin Popplestone
Robin John Popplestone was a pioneer in the fields of machine intelligence and robotics. He developed the POP programming languages....
and Harry Barrow which used the POP-2
POP-2
POP-2, often referred to as POP2 was a programming language developed around 1970 from the earlier language POP-1 by Robin Popplestone and Rod Burstall at the University of Edinburgh. It drew roots from many sources: the languages LISP and ALGOL 60, and theoretical ideas from Landin...
programming language, one of the world's first functional programming
Functional programming
In computer science, functional programming is a programming paradigm that treats computation as the evaluation of mathematical functions and avoids state and mutable data. It emphasizes the application of functions, in contrast to the imperative programming style, which emphasizes changes in state...
languages. The computing hardware was an Elliot 4130 computer with 384KB (128K 24-bit words) RAM and a hard disk linked to a small Honeywell H316 computer with 16KB of RAM which directly performed sensing and control.
Freddy was a versatile system which could be trained and reprogrammed to perform a new task in a day or two. The tasks included putting rings on pegs and assembling simple model toys consisting of wooden blocks of different shapes, a boat with a mast and a car with axles and wheels.
Information about part locations was obtained using the video camera, and then matched to previously stored models of the parts.
It was soon realised in the Freddy project that the 'move here, do this, move there' style of robot behavior programming (actuator or joint level programming) is tedious and also did not allow for the robot to cope with variations in part position, part shape and sensor noise. Consequently, the RAPT robot programming language was developed, in which robot behavior was specified at the object level.
This meant that robot goals were specified in terms of desired position relationships between the robot, objects and the scene, leaving the details of how to achieve the goals to the underlying software system. Although developed in the 1970s RAPT is still considerably more advanced than most commercial robot programming languages.
The team of people who contributed to the project were leaders in the field at the time and included Pat Ambler, Harry Barrow, Ilona Bellos, Chris Brown, Gregan Crawford, Jim Howe, Austin Tate
Austin Tate
Professor Austin Tate FRSE FBCS FAAAI is Director of AIAI in the School of Informatics at the University of Edinburgh. He holds the Chair in Knowledge-based systems at the University of Edinburgh...
and Ken Turner.
Also of interest in the project was the use of a structured-light 3D scanner to obtain the 3D shape and position of the parts being manipulated.
The Freddy II robot is currently on display at the Royal Museum in Edinburgh
Edinburgh
Edinburgh is the capital city of Scotland, the second largest city in Scotland, and the eighth most populous in the United Kingdom. The City of Edinburgh Council governs one of Scotland's 32 local government council areas. The council area includes urban Edinburgh and a rural area...
, Scotland
Scotland
Scotland is a country that is part of the United Kingdom. Occupying the northern third of the island of Great Britain, it shares a border with England to the south and is bounded by the North Sea to the east, the Atlantic Ocean to the north and west, and the North Channel and Irish Sea to the...
, with a segment of the assembly video shown in a continuous loop.
External links
- Edinburgh's Artificial Intelligence Applications Institute page More information.
- Freddy II A video (167 Mb WMV) from 1973 of Freddy II in action assembling a model car and ship simultaneously. Harry Barrow is the narrator. Pat Ambler, Harry Barrow, and Robin Popplestone appear briefly in the video.
- historical overview of the Freddy project by Pat Ambler.
- Record of experiences Harry Barrow writes on interfacing Freddy I to a computer.
- Presentation slide Freddy is mentioned in Aaron Sloman's (slide 23) (PDF)
- public symposium on 50 years of AI Aaron Sloman at the University of Bremen in June 2006
- BBC Robotics Timeline list includes Freddy II.